5 ВТОРИЧНЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ И БИОТЕЛЕМЕТРИЧЕСКИЕ СХЕМЫ
5.1 УСИЛИТЕЛИ
БИОСИГНАЛОВ (УБС)
5.1.1 Особенности
биоэлектрических генераторов и их учет
при проектировании УБС
Источником сигналов для
УБС являются живые организмы (биологические объекты). Основными особенностями биоэлектрических
источников сигнала, которые необходимо учитывать при проектировании УБС,
являются:
- нестабильность и обычно
высокое значение внутреннего сопротивления биоэлектрических генераторов. В
процессе длительного исследования внутреннее сопротивление эквивалентного
генератора возбуждения может меняться в пределах 103-106 Ом, что определяет
необходимость высокого входного сопротивления УБС;
- на входах УБС не
допускается наличие напряжения, которое через подводящие провода и электроды
оказывало бы воздействие на биообъект в виде возбужденных макро- или микротоков;
- необходимость
подавления паразитного синфазного сигнала, который по величине может во много
раз превысить полезный разностный (дифференциальный) сигнал. Основными
причинами возникновения синфазных помех на входах УБС являются наводки
промышленной частоты, наводки от источников возбуждающего напряжения,
применяемых при измерении ряда физиологических параметров, физиологические
помехи, представляющие собой сигналы от соседних органов и тканей. Подавление
синфазных сигналов осуществляется применением на входе УБС дифференциальных
усилителей (каскадов).
Размах биоэлектрических
сигналов, снимаемых при различных электрофизиологических исследованиях, лежат в
диапазоне от 5 мкВ до 120 мВ, диапазон частот этих сигналов - от 10-4 до 108 и
более.
5.1.2 Методы отвода биосигналов с помощью электродов. Однополярное и биполярное
отведения: сущность, условия и примеры применения
Разнообразие методов
регистрации биопотенциалов, морфологические и функциональные различия
исследуемых органов и тканей порождают множество систем отведения
биопотенциалов, большинство которых специфично для того или иного метода
регистрации.
Съем биопотенциалов
независимо от класса исследований производится, как правило, с помощью
электродов, накладываемых на поверхность предварительно обработанной кожи.
Место наложения, число электродов и способов их соединения обусловливают форму
кривых. Выбор способа отведения зависит от диагностической ценности
определяемых параметров.
Все используемые
отведения можно разделить на биполярные, или двухполюсные, когда оба электрода
являются измерительными и разность потенциалов регистрируется между двумя
точками поверхности тела, и многоэлектродные, когда в требуемых точках тела
накладываются две группы электродов, а электроды каждой группы соединяются
через резисторы (суммирующие цепи), образуя две ветви отведения. Общие точки
каждой ветви подключаются к входу усилителя. Число электродов в ветви может
доходить до 8-16 (например, для электроэнцефалографии).
При униполярных (монополярных) отведениях в каждую ветвь включается только
один электрод. В этом случае один электрод является измерительным, а другой
представляет собой нулевой, индифферентный. Униполярное отведение позволяет
регистрировать биоэлектрическую активность в точке наложения электрода.
Существует также смешанный тип отведения.
Реализация указанных двух
классов отведений для разных методов исследования биопотенциалов различна.
Рассмотрим системы отведения для основных классов электрофизиологических
исследований, наиболее широко используемые при диагностике и непрерывном
контроле.
5.1.2.1
Системы отведений для электрокардиографии
Наибольшее
распространение при регистрации электрокардиограммы получили 12 способов
отведения, основанных на концепции треугольника Эйнтховена.
Исследуя процесс
регистрации биоэлектрической активности сердца, Эйнтховен
сделал ряд допущений. Он рассматривал человеческое тело по отношению к
электрическому полю в виде однородного проводника. Генератор сердечной э.д.с. он заменил точечным диполем и поместил его в центре
равностороннего треугольника, вершины которого расположил на правой и левой
руках (у кистей) и левой ноге (у ступни). При таких допущениях сердце и три
указанные точки должны располагаться во фронтальной плоскости, а работа
генератора сердечной э.д.с. должна отображаться в
виде вектора, длина и направление которого могут изменяться только в пределах
этой плоскости. Если обозначить потенциалы в вершинах треугольника через U1, U2 и U3, то легко убедиться, что
для треугольника Эйнтховена выполняется условие:
U1+U2+U3=0
Это условие используется
в униполярных отведениях по Вильсону V1..V6. Для таких отведений особенно важен
выбор места наложения индифферентного электрода. По концепции Эйнтховена, сумма разностей потенциалов, измеренных между
вершинами треугольника, равна нулю. Следовательно, появляется возможность
создать "нулевой" электрод. Для этого три конечности (вершины
треугольника) подключаются через одинаковые резисторы (суммирующая цепь) к
общей точке, которая и принимается за нулевой электрод. Измерительный электрод
при этом можно помещать в любой точке тела, подводить к любой конечности или
точке грудной клетки.
Имеются и другие системы
отведения ЭКГ сигнала. Например, три двухполюсных отведения от конечностей -
классическое отведение, грудные отведения и др.
5.1.2.2
Системы отведений для электроэнцефалографии
Существует несколько
систем отведений для регистрации электроэнцефалограммы (ЭЭГ). Для оценки общего
функционального состояния мозга обычно используют одноканальные системы. Для
выявления локализованного патологического очага применяют многоканальную
регистрацию ЭЭГ.
Обычно число каналов
регистрации равно 8 или 16. Схема расположения электродов должна обеспечивать
их равномерное распределение по разделам - лобные, затылочные, центральные,
теменные и т. д.; электроды должны располагаться в строго симметричных точках
обеих полушарий.
Как и в других
электрофизиологических методах, при регистрации ЭЭГ
различают монополярные, биполярные отведения и их
модификации. При монополярном отведении один из двух
электродов (индифферентный) каждого канала должен располагаться на электрически
нейтральной точке головы. В качестве такой точки чаще всего выбирают точку уха
или переносицу (причем для отведения с левого полушария используется точка
левого уха, и наоборот). Другой электрод (дифферентный)
устанавливают над исследуемым активным участком мозга.
Однако расположение
индифферентного электрода не всегда удовлетворяет исследователя, так как точка установки
этого электрода не является электрически идеально нейтральной. В этих случаях
по аналогии с электрокардиографией создают искусственную систему
"нейтральной" точки (нулевой электрод), используя схему суммирования.
Главным недостатком такого "индифферентного" электрода можно считать
взаимное влияние регистрируемых сигналов через суммирующую цепь. Поэтому для
данной системы отведения необходимы контрольные отведения иного типа,
установленные одновременно.
При биполярном отведении
все каналы независимы, и разность потенциалов регистрируется между двумя
электродами, расположенными над активными участками мозга. При этом
зарегистрированная активность действительно наблюдается вблизи электродов или
на участке между ними. Вместе с тем при биполярном отведении трудно оценить
вклад в суммарную разность потенциалов каждого участка, над которым расположены
электроды. Для установления данного вклада применяют отведение цепочкой; в этом
случае для двух соседних каналов съема один электрод является общим. Такая комбинация
биполярного отведения с элементами монополярного
позволяет довольно точно локализировать очаг возбуждения. Частным случаем
отведения цепочкой является триангуляция - тип отведения, при котором
используются три электрода, расположенные вокруг очага возбуждения
треугольником.
5.1.2.3
Регистрация эдектромиограммы, электроокулограммы
и кожно-гальванической реакции
При регистрации электромиограммы (ЭМГ), электроокулограммы
(ЭОГ) и кожно-гальванической реакции (КГР), как правило, используется одна пара
электродов, устанавливаемая в определенной точке тела. Для отведения глобальных
ЭМГ применяются поверхностные электроды, которые накладывают вдоль исследуемой
мышцы на те места, где амплитуда биопотенциалов максимальна. При регистрации
локальных ЭМГ используют игольчатые электроды. По способу съема также различают
монополярные и биполярные отведения.
Кожно-гальваническая
реакция регистрируется с помощью электродов, которые накладываются обычно на
поверхность ладони или стопы. При использовании ЭОГ электроды накладывают около
главной впадины по поперечной или продольной оси глаза.
5.1.3 Взаимодействие входных цепей
УБС с биообъектом
Живой объект как источник
сигнала для УБС можно рассматривать в виде эквивалентного генератора напряжения
Uс с последовательно
включенным сопротивлением Ri, состоящим из внутреннего сопротивления самого
генератора и участком кожи, к которому приложен электрод (рисунок 5.1.3а).
Рисунок 5.1.3 –
Эквивалентная схема входной цепи УБС: а- полная; б-
упрощенная
На рисунке 3а Rk и Ск -
сопротивление и емкость кожи между электродом и прилегающими внутренними
тканями; Rэ
и Сэ
- сопротивление и емкость электродов; Rэл - сопротивление электролита; Z1,2 Z', Z" -
сопротивления входной цепи ЛУ.
Для практических расчетов
целесообразно использовать упрощенную схему (рисунок 5.1.3б).
Сопротивление Rс эквивалентных
генераторов возбуждения под действием ряда факторов (изменение кровенаполнения,
сопротивления "кожа-электрод" и других) может существенно меняться в
процессе исследования и может находиться в диапазоне 103-106 Ом. Разность
сопротивлений ∆Rс=R'c- R"c может достигать десятков и сотен килоОмов, что обуславливает довольно жесткие требования к
входной цепи усилителя с точки зрения обеспечения высокого входного
сопротивления. Например, можно показать, что, если ∆Rc=
50 кОм и допустимая погрешность от этого изменения в сигнале на входе равна
0,01 %, то входное сопротивление усилителя должно быть не менее Zвх.y = 500
МОм.
Необходимость в таком большом
входном сопротивлении обусловлена необходимостью подавления помех, вызываемых
изменением внутреннего эквивалентного источника биосигнала
в процессе измерений. Т.к. внутреннее сопротивление биогенератора
может изменяться только достаточно медленно, то высокое входное сопротивление
усилителя должно быть обеспечено в области инфранизких
частот (порядка единиц герц и менее).
5.1.4 Искажения биосигналов
при их съеме. Помехи, действующие на входе УБС
В зависимости от
характера проявления все помехи, возникающие во входных цепях УБС, делятся на разностные (дифференциальные) и синфазные. Разностная
помеха представляет собой разность потенциалов между входными проводниками УБС,
вызванную действием этой помехи, и не может быть отделена от полезного сигнала,
если их частотные спектры перекрываются. Синфазная помеха представляет собой
одинаковые потенциалы на обоих входах УБС.
В зависимости от
характера возникновения помехи во входных цепях могут быть обусловлены
различными причинами:
Наведенные помехи.
Биоэлектрические сигналы (биопотенцилы) обычно имеют
весьма малый уровень (порядка мкВ или мВ). Причем электроды соединяются с
помощью относительно длинных проводов с источником сигнала, имеющим высокое
внутреннее сопротивление и занимающим в пространстве значительный объем. По
причинам различного происхождения (в основном за счет полей рассеяния) в линию
связи индуцируется электрический сигнал, который может в десятки и сотни раз
превышать отводимый биопотенциал. По своей структуре по отношению к
симметричному входу УБС этот наведенный сигнал является обычно синфазным в
отличие от полезного (нормального) сигнала, который является противофазным.
Основный местом наведения синфазной помехи служит вход УБП.
Существует несколько
основных причин возникновения синфазного сигнала в УБП:
1) Наводки от сети
промышленной частоты. Эти наводки могут возникнуть в цепях УБП при работе
вблизи токоведущих проводов. При этом в сигнальных и общей шинах индуцируется
ЭДС, величина которой определяется выражением
![]()
где l - длина параллельных проводов,
[см]; d- расстояние
между проводами, [см]; w
- угловая частота переменного тока; I -
ток, [А].
Например, ток в 100 А на частоте 50 Гц в параллельных проводах длиной 30 м,
расположенных на расстоянии 30 см, создает напряжение синфазной помехи около 1 В. Кроме того,
наводка промышленной частоты может индуцироваться в цепях УБС за счет различных
разомкнутых электрических цепей, плоскость которых перпендикулярна токонесущим проводникам. При этом наведенная ЭДС
определяется формулой:
![]()
где S - площадь, охваченная разомкнутой
электрической цепью, [м2]; l - расстояние от рамки до проводника.
Кроме помехи промышленной
частоты на вход УБС могут наводиться сигналы других частот, в частности,
радиосигнал, который в результате детектирования на нелинейных элементах
усилителя может создавать помеху, лежащую в спектре частот усиливаемого
сигнала.
Схема возникновения помех
во входных цепях УБС из-за наводок сетевой частоты схематично показана на
рисунке 4.
Рисунок 5.1.4 – Схема возникновения
помех из-за наводок на биообъект
Помехи наводятся через
паразитные емкости Cп1 и Сп2.
Если сопротивление между точками 2 и 3 равно Z0, то напряжение помехи в точке 2 будет равно:
Un2= Uп1.
В противном случае будет
возникать разностная помеха на входах УБС.
Для ослабления напряжения
помех при необходимости используется нейтральный электрод, с помощью которого
пациента соединяют с заземляющим проводом. При этом вследствие малого
сопротивления Z0 и
шунтирования емкости Сп2 заземляющим проводом напряжение помехи сильно
ослабляется.
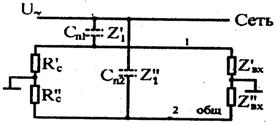
Напряжение помех Un
может наводиться не только на биообъект, но и на линию, связывающую
биообъект со входом УБС (рисунок 5).
Рисунок 5.1.5 - Схема возникновения
помех на линии, соединяющей биообект со входом УБС
Если между сигнальными
проводами 1 и 2 и сетью имеется емкость Cп1
и Cп2 с сопротивлениями Z1 и Z2 соответственно, то напряжения помех будут равны:
![]()
![]()
где Z'2=R'c||Z'bх,
Z''2=R''c||Z''bх.
При большом входном
сопротивлении УБС сопротивления Z'2
и Z"2 определяются в
основном сопротивлениями входных концов линии R'c и R"c
. Для уменьшения наводок на провода линии эти сопротивления необходимо
уменьшать, например, применением электродных усилителей, располагаемых в
непосредственной близости от электродов в единой с ними конструкции.
Магнитные разностные
наводки уменьшаются путем сближения проводов 1 и 2 за счет уменьшения площади
замкнутого контура, пронизываемого переменным магнитным полем источника помехи,
2) Наводки от источников
возбуждающего напряжения. При изменении ряда физиологических параметров
(дыхания, давления, температуры и др.) используются различного типа датчики с
дополнительными источниками возбуждения, которые также могут явиться причиной
возникновения помех. Примером этого может служить мостовая измерительная схема,
в которой на зажимах, подключаемых к измерительному прибору, относительно
нулевого провода источника питания (генератора) возникает напряжение, равное
половине напряжения источника.
3) Гальваническая ЭДС и
поляризация электродов. На границе электрод-поверхность отведения возникает гальваническо-поляризационная ЭДС. Эта ЭДС может появляться
как на сигнальных, так и "земляном" электродах, приводя к
возникновению мешающего сигнала.
4) Физиологические
помехи. Этот вид помех, как уже отмечалось, обусловлен многосвязностью
организма, в результате чего в точках отведения кроме полезного сигнала всегда
присутствуют помехи от соседних органов и тканей.
Следует отметить, что
большинство рассмотренных помех (включая такие физиологические помехи, как
кожные потенциалы) относятся к синфазным сигналам, т. е. сигналам, являющимся
по отношению к симметричной линии связи (в данном случае по отношению ко входу УБС) идентичными как по амплитуде, так и по фазе. В
отличие от такой помехи полезный сигнал является дифференциальным.
Кроме рассмотренных
существуют и другие причины возникновения синфазной помехи на входе УБС, в
частности, падение напряжения в заземляющих проводах, однако их удельный вес в общем механизме возникновения однотипных сигналов
сравнительно невелик.
5.1.5 Методы борьбы с помехами во
входных цепях
Наиболее радикальный, но
редко доступный метод борьбы с синфазными помехами - устранение причин их
возникновения или уменьшение их влияния до допустимых пределов, например, путем
выключения или удаления источника наводки.
Способы уменьшения
напряжения синфазного сигнала схемно-конструктивными методами:
1) Экранирование
позволяет избавиться от большинства наведенных помех, однако остаются еще
источники возбуждающего потенциала и другие причины внутреннего происхождения.
Кроме того, следует учитывать, что во многих исследованиях экранирование
измерительного устройства в принципе недопустимо. Поэтому возникает проблема борьбы
с синфазными помехами
2) Скручивание подводящих
проводников позволяет уменьшить наведенную ЭДС от внешних электромагнитных
полей. Кроме того, скручивание дает возможность лучше сбалансировать емкость на
"землю" этих проводников. Для уменьшения этого уровня наводок оба
подводящих к УБП проводника
целесообразно размещать в одном экране.
3) Балансировка и
фильтрация являются достаточно эффективными, если синфазная помеха занимает
частотный диапазон, отличный от спектра передаваемой информации. Примером
подобных мер может служить использование блокировочного конденсатора для
уменьшения высокочастотной наводки на вход УВС.
4) Использование
специальных электродов, паст, методов крепления и точек отведения, уменьшающих
напряжение гальваническо-поляризационной ЭДС и кожных
потенциалов.
Рассмотрим, например,
меры, способствующие уменьшению влияния поляризационно-гальванической ЭДС.
Рисунок 5.1.6 - Эквивалентная схема
УБС с источниками поляризационно-гальванической ЭДС
На рисунке 5.1.6
изображена эквивалентная схема УБС с источниками поляризационно-гальванической
ЭДС Е1,
Е2, Е0, где R1
, R2 , R3 - внутренние сопротивления источников ЭДС
сигнальных и нулевого электродов. Из эквивалентной схемы нетрудно получить
уравнения для напряжений помехи на входе УБС от действия этих ЭДС:
![]()
![]()
Из этой формулы следует,
что дифференциальный сигнал U1
- U2 на входе УБС будет определяться как
характеристикой УБС, так и трудно контролируемыми параметрами источников поляризационно-гальванических
ЭДС. Единственный путь уменьшения влияния этих ЭДС - повышение входного
сопротивления усилителя и его симметрирование. При этом разность потенциалов на
выходе УБП будет полностью определяться разностью потенциалов источников Е1 и
Е2:
U=U1-U2≈E1-E2
Применением специальных
неполяризующихся электродов, идентичных по конструкции и месторасположению, эту
разность можно создать достаточно малой. В противном случае можно применить
какой-либо метод компенсации.
Использование схем без источников
возбуждения или с источниками, создающими однотипную помеху с частотным
спектром, существенно отличающимся от спектра измеряемой информации;
использование дифференциальных усилителей с высоким коэффициентом ослабления
синфазного сигнала.
5.1.6 Характеристики УБС по отношению
к полезному сигналу и по отношению к помехам
УБС обычно используются для усиления сигналов низкого уровня в
условиях действия значительных синфазных помех, во много раз превышающих
уровень полезного биопотенциала. Основным источником помех при съёме сигналов
биоэлектрической активности являются магнитные и электрические наводки на
биообъект и сигнальные кабели, соединяющие электроды с усилителем, а также
физиологические помехи. Синфазная помеха – это напряжение, наводимое одновременно
на две или более линии, передающие сигнал.
Для подавления синфазных помех при усилении малых биоэлектрических
сигналов широко используют дифференциальные усилители. Функциональная схема
дифференциального усилителя в условиях действия на вход дифференциального и
синфазного сигналов показана на рисунке 5.1.6.
Рисунок 5.1.6
– Функциональная схема дифференциального усилителя
Реакцию УБС на воздействие дифференциального и синфазного сигналов
характеризуют следующие основные параметры:
1. Коэффициент усиления дифференциального (разностного) сигнала
![]()
В соответствии с функциональной схемой дифференциального
усилителя:
Кдиф = (|А2|+|A1|)/2,
где A2 и A1 – коэффициенты усиления
сигнала по неинвертирующему и инвертирующему входам
соответственно.
2. Коэффициент усиления синфазного сигнала
![]()
Из функциональной схемы ДУ следует видно, что |A2|-|A1|. (Следует отличать, что
здесь Uвых
– та часть выходного
напряжения, которая вызвана действием синфазной помехи).
3. Коэффициент ослабления синфазного сигнала (КОСС)
![]()
Выходной сигнал при одновременном воздействии дифференциального и
синфазного сигналов определяется выражением:
![]()
3. Коэффициент преобразования синфазной помехи в дифференциальный
сигнал
![]()
Здесь ![]() – выходное напряжение, обусловленное действием Uсф
на входах
усилителя.
– выходное напряжение, обусловленное действием Uсф
на входах
усилителя.
5.1.7 Синфазные помехи
Если бы источник
биопотенциалов, линия связи и УВС были строго симметричны, то проблема борьбы с
синфазной помехой не существовала. Однако по ряду причин такую симметрию либо
невозможно получить» либо в процессе эксперимента она нарушается. В результате
синфазная помеха преобразуется в дифференциальный сигнал, который уже
невозможно отличить от полезного сигнала.
Основными местами
преобразования синфазной помехи в нормальный дифференциальный сигнал при
регистрации биоэлектрической активности являются источник биосигналов,
отводящие провода и непосредственно УБС.
Источник биопотенциалов с
точки зрения возникновения синфазной помехи можно представить в форме,
изображенной на рисунке 5.1.7, где С1, С2 - емкости
источника биопотенциалов относительно "земли"; Zвн1, Zвн2 - комплексные
сопротивления источника (включая сопротивления участка -
"электрод-кожа".
Рисунок 5.1.7 – Эквивалентная схема
источников биопотенциалов
Источник полезного биосигнала на схеме не
показан. Из данной эквивалентной схемы нетрудно получить для коэффициента α:
α=j(Zвн1Хс2-Zвн2Хс1)/[(Zвн1-с1)(Zвн2jХс2)
Если внутреннее
сопротивление источника биопотенциалов достаточно мало, то выражение примет вид
α=j(Zвн/Хс1-Zвн2/Хс2)
Из выражений следует, что
разбаланс внутреннего сопротивления источника,
сопротивления участка, "электрод-поверхность отведения", емкости
биообъекта относительно "земли" будут приводить к преобразованию
синфазных помех в эквивалентный нормальный сигнал. Особенно существенный вклад
в этот процесс будет вносить изменение емкости исследуемого объекта при его
движении. Если положить, что внутреннее сопротивление источника носит чисто
активный характер, причем R1=R2=R,
то коэффициент α
будет полностью определяться разбалансом емкостной
составляющей:
α =jωR(C2-C1)
Отводящие от электродов к
УБС проводники можно представить в виде RC фильтра, изображенного на рисунке
5.1.8, где роль R играют
сопротивления проводников, а С - емкости этих проводников относительно "земли"
или экранирующей оплетки.
Рисунок 5.1.8 Эквивалентная схема
подводящих проводников
Представив сопротивления
и емкости в сосредоточенной форме, получаем эквивалентную схему, рассмотренную
ранее (рисунок 5.1.7). Очевидно, что преобразование синфазной помехи в
нормальный сигнал может происходить в подводящих проводах из-за активного и
емкостного разбаланса. Вследствие того, что обычно R1=R2, то наиболее
существенное влияние здесь играет емкостный разбаланс.
5.1.8 Схемотехнические принципы построения
и расчет УБС на базе операционных усилителей и интегральных измерительных
усилителей. Коэффициент ослабления синфазного сигнала
Простейший дифференциальный усилитель на одном ОУ показан на
рисунке 5.1.8а.
Рисунок
5.1.8 - Дифференциальные усилители на одном ОУ
Выходное напряжение представляет собой сумму двух составляющих,
одна из которых обусловлена сигналом U1, а другая сигналам U2:
![]()
Если принять:
![]()
то выходное напряжение
будет изменяться пропорционально разности входных сигналов:
![]()
При применении реального ОУ дифференциальный усилитель каждое из
входных напряжений будет усиливать с погрешностями, свойственными
соответственно для инвертирующего и неинвертируютего
усилителей на ОУ. Поскольку
в неинвертирующем усилителе входное напряжение
подается на неинвертирующий вход, а на инвестирующем
входе за счёт действия отрицательной ОС напряжение стремиться
к тому же значению, что эквивалентно действию синфазного сигнала с уровнем,
равным входному напряжению, т.е. возникает погрешность, вызываемая конечным
коэффициентом ослабления синфазного сигнала Мсф. С учётом этой
погрешности:
![]()
Таким образом, для того, чтобы усилитель реагировал только на
разность входных сигналов, необходимо отношение сопротивлений R3/R4 устанавливать, исходя из равенства:
![]()
Недостатками данного дифференциального усилителя являются относительно
низкие входные сопротивления и трудности регулировки коэффициента усиления. Входные сопротивления
усилителя по схеме рисунка 5.1.8 для
сигналов U1 и U2 равны соответственно
![]() ;
; ![]()
Для того, чтобы иметь Rвх1=Rвх2,
необходимо
принять:
![]() ;
;
![]()
Низкие входные сопротивления простейшего дифференциального
усилителя приводят к тому, что его коэффициенты усиления для сигналов U1 и U2 будут зависеть от
внутренних сопротивлений источников этих сигналов.
Регулировка коэффициента усиления в рассматриваемом усилителе
возможна только путём одновременного изменения двух резисторов (например, R2 и R4).
Производить регулировку усиления, не нарушая "дифференциальности" усилителя, позволяет несколько
усложнённая схема дифференциального усилителя (рисунок 5.1.8б).
Для того, чтобы коэффициенты усиления
напряжений U1 и U2 были одинаковыми по
модулю, необходимо принять:
![]() ;
; ![]() ;
; ![]()
Тогда выходное напряжение:
![]()
Регулировку коэффициента усиления можно производить, изменяя
сопротивление R7.
Сложные дифференциальные усилители. Чтобы построить
дифференциальные усилители, имеющие высокие входные сопротивления для обоих
источников сигнала, необходимо применить два или три ОУ.
Схема ДУ на
двух ОУ показана на рисунке 5.1.9.
Рисунок 5.1.9
– Дифференциальный усилитель на двух ОУ
Если нужно, чтобы выходное напряжение было пропорционально
разности входных напряжений (U2-U1), то необходимо
выполнение равенства R2/R1 = R3/R4. При этом коэффициент
усиления, равный
![]()
можно регулировать,
изменяя сопротивление R7.
На рисунке 5.1.10 показана схема дифференциального усилителя на
трёх ОУ.
Рисунок
5.1.10 – Дифференциальный усилитель на трёх ОУ
При R7/R6 = R5/R4 выходное напряжение:
![]()
Для регулировки коэффициента усиления в данном случае можно
использовать резисторы R1, R2 и R3.
В схеме на трёх ОУ коэффициент усиления синфазного сигнала каждого
входного ОУ равен 1 (при идеальных ОУ), в то время как
коэффициент усиления дифференциального сигнала для первого каскада
![]()
Выходной разностный каскад при R5/R4 = R7/R6 имеет К2диф
= R5/R4, а его Ксф зависит от точности подбора
отношений сопротивлений резисторов R4 и R5, а также собственного КОСС ОУ. Поэтому при
одинаковых ОУ благодаря распределению Кдиф между входным и разностным выходным
каскадами схема на трёх ОУ обеспечивает
по сравнению со схемами на одном (или двух) ОУ больший
КОСС. Обычно основное усиление осуществляется входным каскадом, а усиление
выходного устанавливается небольшим (часто равным 1).
Коэффициенты ослабления синфазного сигнала,
которые можно получить в рассмотренных схемах дифференциальных усилителей, в
основном зависят от собственных КОСС используемых ОУ, а также от Кдиф
и
Ксф
схемы.
На Ксф
влияет главным образом погрешность изготовления употребляемых в схемах
резисторов, определяющих усиление усилителя. В таблице приведены средние
величины Ксф, получаемые при использовании
резисторов с различным допуском. Следует заметить, что максимально возможные
значения Ксф
в два раза больше средних.
Таблица 5.1.8 - Влияние допусков резисторов на коэффициент
усиления синфазного сигнала
|
Допуск
резисторов, % |
5 |
2 |
1 |
0,5 |
0,1 |
|
Средняя величина, Ксф |
0,1 |
0,04 |
0,02 |
0,01 |
0,002 |
Для случая идеального ОУ КОСС
схемы зависит только от разбаланса расчётного
соотношения сопротивлений резисторов схемы, несимметричности внутреннего
сопротивления источника сигнала и определяется основным выражением:
Мре = Кдиф/Ксф.
В случае реального ОУ с собственным (внутренним)
КОСО Мвн КОСС каскада определяется выражением:
Mре = Мид∙Мвн/(Мид + Мвн)
Для многокаскадных усилителей КОСС равен
произведению КОСС отдельных каскадов.
Для расчёта требуемого (допустимого) значения КОСС усилителя можно
использовать выражение:
![]() ,
,
![]()
где ![]() – допустимая относительная погрешность от
синфазной помехи на выходе схемы.
– допустимая относительная погрешность от
синфазной помехи на выходе схемы.
После расчёта Мдоп, учитывая выше приведённые соображения, вы6ирают
схему усилителя, тип ОУ, номинальные значения и допуски резисторов схемы.
5.1.9 Источники ошибок в УБС и их
устранение (компенсация). Усилители биосигналов
с гальваническим разделением входа и выхода
Типовой ОУ можно структурно представить в виде последовательно
включённых двух или трёх каскадов усиления, каждый из которых вносит при
усилении сигнала свои погрешности,
При построении
УБС наибольшую роль играют погрешности, вносимые входным каскадом, в качестве
которого используется дифференциальный каскад на биполярных или полевых
транзисторах.
Напряжение сдвига. Напряжение база-эмиттер Uбэ транзисторов одного типа
без отбора в пары при одинаковых напряжениях на коллекторах и одинаковых токах
эмиттеров обычно отличается не более чем на 20 мВ. На практике удаётся подбором
транзисторов в пары и выбором режимов разницу между Uбэ транзисторов, называемую
напряжением сдвига Uсдв, снизить до 1 мВ и
менее.
При увеличении температуры прямое Uбэ кремниевого транзистора
уменьшается, при этом температурный коэффициент равен -2,2 мВ/oС. Результирующий
температурный дрейф дифференциального каскада dUсдв/dT составляет около 3,3
мкВ/oС.
Усилители с полевыми транзисторами на входе имеют в несколько раз
большее напряжение сдвига.
Компенсация напряжения сдвига в современных
ОУ осуществляется обычно
построечным резистором, подключаемым к специальным выводам, либо подачей
напряжения на неинвертирующий вход с подстраиваемого
делителя напряжения (рисунок 5.1.9 а, б).
Рисунок 5.1.9
– Способы настройки нуля для схем инвертора (а), для разностного усилителя (б)
и компенсации тока смещения
Ток сдвига. Рабочая точка входного дифференциального каскада на
биполярных транзисторах устанавливается в линейной области за счёт входных
токов смещения. Эти токи создают падения напряжения на входных резисторах,
которые затем усиливаются усилителем и вызывают появление на выходе напряжения
ошибки. Падение напряжения на входном резисторе можно компенсировать падением
напряжения на резисторе Rk (рисунок
5.1.9в), подключённом ко второму (неинвертирующему)
входу, при этом компенсация происходит за счёт подавления дифференциальным
усилителем синфазной помехи. Однако даже при подобранных сопротивлениях на
выходе остаётся напряжение ошибки, что обусловлено разными значениями
коэффициента усиления входных транзисторов. Типичные значения тока сдвига Iсдв = 50 нА, температурного
коэффициента тока сдвига dIсдв/dT = -0,25 нА/oC.
Входной ток смещения дифференциальных каскадов на полевых
транзисторах составляет единицы пикоампер и
удваивается при увеличении температуры на каждые 10оС.
Входным каскадом определяются также в основном собственные шумы СУ
и коэффициент ослабления синфазного сигнала.
Погрешности, вносимые выходным каскадом, зависят от характера
нагрузки, а также от максимальной скорости изменения выходного напряжения
усилителя. Низкоомная нагрузка уменьшает усиление
усилителя при разомкнутой петле ОС, что в свою очередь приводит к сужению
полосы пропускания усилителя (рисунок 5.1.10).
Рисунок
5.1.10 – Влияние выходной нагрузки на характеристики усилителя
При емкостной нагрузке на АЧХ образуется дополнительный излом, частота которого
определяется следующей формулой:
![]()
При достаточно большой емкостной нагрузке, кроме того, могут
происходить резкие подъёмы коэффициента усиления на некоторых частотах, а также
увеличивается возможность возбуждения. Однако эти эффекты можно компенсировать
путем подключения параллельно цепи обратной связи конденсатора небольшой
ёмкости, величина которого определяется выражением:
![]()
Одним из параметров операционных усилителей является скорость
нарастания выходного напряжения, определяемая как скорость, с которой нарастает
выходное напряжение при поступлении на вход усилителя скачкообразного сигнала.
Недостаточная величина этой скорости препятствует неискажённой передаче
сигнала. Скорость нарастания определяется из соотношения:
![]()
Причём первая часть этого соотношения определяет требуемую
скорость нарастания при данном выходном сигнале с двойной амплитудой Uвых.дв и частотой fc,
а по
второй определяют либо максимально допустимую ёмкость Сн нагрузки при
известном максимальном выходном токе Iвых.макс ОУ, либо требуемый
выходной ток усилителя при известной ёмкости нагрузки.
При построении УБС на ОУ погрешности выходных каскадов ОУ обычно
не порождают особых трудностей, т.к. биосигналы
являются низко- и ннфранизкочастотными.
Механизм действия синфазной помехи иллюстрируется на рисунке 5.1.11а. Источник входного сигнала
(ИВС) и усилитель У
через комплексные сопротивления Zсв1
и Zсв2 имеют
электрическую связь с землёй. Сопротивления Zсв1
и Zсв2 могут
быть обусловлены емкостными связями, всегда существующими между ИВС или У, с одной стороны, и землёй – с другой стороны, или могут представлять собой
непосредственно
сопротивления заземляющих проводников, если по условиям эксперимента или по соображениям
техники безопасности ИВС, или У, или они оба должны быть заземлены (в последнем
случае соответственно Zсв1 =0, или Zсв2=0,
или Zсв1
= Zсв2 =
0). Из-за
блуждающих токов, вызываемых, например, заземлением силовых установок,
потенциалы различных точек различны. Это даёт возможность в эквивалентную схему
рисунка 5.1.11, а включить между двумя заземленными точками источник синфазной
помехи Uп с его внутренним
сопротивлением Zп. При удалении двух точек заземления на
расстояние 0,5 км разность потенциалов Uп между ними может
составлять 10-15 В при
внутреннем сопротивлении Zп,
равном нескольким долям Ома или единицам Омов.
Рисунок 5.1.11 – Действие синфазной помехи на входе
УБС
За счёт токов, текущих во входных цепях усилителя и обусловленных
источником Uп, синфазная помеха
приводит к появлению нормальной помехи. Электрическая схема на рисунке 5.1.11
а, позволяет найти составляющую входного сигнала усилителя Увк.п.,
обусловленную помехой Uп. На схеме рисунка
5.1.11б r1 и r2 – это сопротивления
проводов, соединяющих источник сигнала и усилитель; на этом рисунке принято
также, что напряжение Uвх,
и внутреннее сопротивление источника
сигнала равны нулю. Согласно этой схеме, предполагая, что r1, r2<<Rвх, получаем:
![]()
где
zсв.об = zсв1 + zсв2 + zп.
При экранировании входных проводов усилителя не следует экран с
обеих сторон соединять электрически с соответствующими точками входной цепи. Действительно, если экран соединить с обеих сторон
(связи 1 и 2 на рисунок
5.1.11а), то он окажется включённым параллельно низкопотенциальному
входному проводу (r2). В
этом случае действующие на экран наводки (Uн на
рисунке 5.1.11а), обусловленные емкостными и индуктивными связями экрана с
различными посторонними источниками сигналов, тоже будут выступать как
источники синфазных помех, что снизит помехозащищённость прибора. Если же
соединить экран с входной цепью только в одной точке, то влияние наводок
скажется гораздо меньше. В какой именно точке присоединять экран – ответ на
этот вопрос мы получим после сравнения между собой сопротивлений связи Zсв1 и Zсв2.
Присоединение
экрана нужно производить в точке, имеющей лучшую связь с землей. Так, что если Zсв1 > Zсв2, то экран следует
присоединить к корпусу прибора (связь на рисунке 5.1.11а), если же Zсв2 > Zсв1,
то экран следует присоединить к низкопотенциальному зажиму источника входного сигнала
(связь 2).
Симметрирование входной цепи. Схема с низкопотенциальным
входным зажимом, соединённым с корпусом (рисунок 5.1.11а) обладает наименьшим
подавлением синфазной помехи (оцениваемым отношением Uп/Uвх.п). С этой точки зрения предпочтительна схема с симметричным
входом (рисунок 5.1.11 в, г), для которой в предположении, что Rвх1 = Rвх2 = Rвх >> r1, r2
получаем:
![]()
Таким образом, если уравновесить мост, составленный из
сопротивлений Rвх1, Rвх2, r1, г2 (рисунок 5.1.11г), то синфазная помеха будет
полностью подавлена. Однако такое уравновешивание требует симметрирования
входной линии и входных
сопротивлений усилителя, что неудобно в эксплуатации. Кроме того, усилитель в
этом случае должен работать при больших значениях синфазного входного сигнала, так
что необходимо следить за тем, чтобы этот сигнал не превзошёл допустимого в
применяемом усилителе уровня.
Рисунок
5.1.12 – Схемы входных цепей усилителя с гальваническим разведением
Гальваническое разделение (ГР). С точки
зрения борьбы с влиянием синфазной помехи предпочтительным оказывается
гальваническое разделение входных и выходных цепей усилителя. Оно позволяет получить между входными цепями усилителя и связанными с
его корпусом выходными цепями гарантировано высокое сопротивление связи Zсв3 (рисунок 5.1.12 a). А
это в свою очередь позволяет уменьшить обусловленную с помехой составляющую
входного сигнала Uвх.п. Как следует из схемы
рисунка 5.1.12 б,в данном
случае:
![]()
Так как обычно zсв1 < zсв1 + zсв3, то при применении усилителя с гальваническим разделением экран
входной линии, как правило, соединяют с низкопотенциальным
зажимом источника сигнала. Для снижения влияния наводок часто при этом
применяют также двойное экранирование, причём дополнительный наружный экран в
этом случае соединяют с корпусом прибора (рисунок 5.1.12а).
Ещё большее подавление синфазной помехи достигается в случае
гальванического разделения с защитным экранированием, когда внутренний экран
линии связи соединяют как с низкопотенциальным
зажимом источника, так и с внутренним кожухом прибора, экранирующим входную
часть усилителя. При этом сам внутренний кожух непосредственно не соединён
электрически с низкопотенциальным входным зажимом усилителя. Как следует из рисунка
5.1.12 в,г, в этом
случае:
![]()
где гэ – сопротивление
внутреннего экрана;– сопротивление связи входных зажимов усилителя с внутренним
экраном. Последнее соотношение показывает, что при Zсв3>>rэ и Zсв4>>r2 мы получим очень большое
подавление синфазной помехи. Реальное значение помехоподавления может быть в
данном случае ограничено неравным бесконечности сопротивлением связи входной
части усилителя с его наружным корпусом – сопротивлением Zсв5 на рисунке 5.1.12г.
Практически помехоподавление рассмотренных вариантов построения
прибора примерно таково: применение симметричного входа позволяет получить
подавление синфазной помехи, выраженное в децибелах (20∙lg(Uп/Uвx.п)), равное 30-40 дБ; при
гальваническом разделении помехоподавление возрастает до 50-60 дБ и, наконец,
гальваническое разделение с защитным экранированием обеспечивает
подавление синфазной помехи 80-100 дБ и выше. Приведённые цифры относятся к
помехам постоянного тока или частоты 50 Гц. Заметим, что эффективным методом
борьбы с высокочастотными синфазными помехами является применение режекторных дросселей и компенсирующих трансформаторов,
обмотки которых включаются в соединительные линии таким образом, чтобы
обеспечить малое сопротивление для полезного сигнала и большое – для синфазной
помехи.
Для гальванического разделения цепей в измерительных усилителях
могут использоваться трансформаторы, оптроны, ключевые элементы, не имеющие
гальванической связи между сигнальной и управляющей цепями (реле, МОП-переключатели).
Гальваническое разделение (ГР) в усилителях переменного напряжения.
Наиболее просто задача гальванического разделения решается в усилителях
переменного напряжения: в них достаточно включить разделительный трансформатор
на входе или выходе. Для того чтобы погрешность коэффициента
усиления, вносимая нестабильностью коэффициента передачи разделительного
трансформатора, была пренебрежимо малой, необходимо, чтобы приведенное активное
сопротивление обмоток трансформатора было существенно ниже (в 50-100 раз и
более) его индуктивного сопротивления на холостом ходу во всём рабочем диапазоне частот и существенно ниже
приведенного сопротивления нагрузки. Индуктивное сопротивление на холостом ходу в свою очередь должно быть много больше
приведённого сопротивления нагрузки. К этому добавляется
требование малой емкостной связи между первичной и вторичной обмотками.
Всё это увеличивает габариты и массу разделительного трансформатора, усложняет
его конструкцию.
Примеры бeстрансформаторных схем ГР показаны на
рисунке 5.1.13. Рисунок 5.1.13а иллюстрирует способ ГР с помощью четырёх МОП-ключей и "летающего" конденсатора. На
управление ключами подаются противофазные прямоугольные переменные напряжения Uк' и Uк''. Благодаря этому конденсатор С присоединяется то к источнику
входного сигнала Uвх, то к входу усилителя У.
Таким образом осуществляется подача напряжения Uвх на вход усилителя при
отсутствии прямой связи между источником сигнала и входом усилителя.
В усилителе по схеме рисунка 5.1.13 б ГР
осуществляется с помощью оптрона. Оптрон здесь условно показан в виде одного
светодиода и двух фотодиодов. Если коэффициенты передачи напряжения от входа
светодиода до выходов обеих фотодиодов всегда одинаковы (но необязательно
стабильны), то усилитель в целом будет иметь стабильный коэффициент усиления,
равный в первом приближении 1/β (если
коэффициент усиления усилителя У достаточно большой).
1 - модулятор; У - усилитель переменного
напряжения; ДМ - демодулятор; β - коэффициент
передачи цепи ОС
Рисунок 5.1.13 – Примеры схем бестрансформаторных цепей гальванического разделения
5.1.10 Особенности проектирования усилителей биопотенциалов
При проектировании усилителей биопотенциалов наиболее сложными
этапами являются: составление функциональной схемы устройства, анализ требований
к отдельным блокам, согласование входной цепи и каскадов усиления. Идеальным для регистрации биопотенциалов был бы усилитель, который
обладает бесконечно большим входным сопротивлением, полностью подавляет помехи
от силовой сети, нечувствителен к потенциалам поляризации электродов и разностным
помехам, лежащим за пределами полосы частот полезного сигнала, не имеет
собственных шумов, способен сохранять свои характеристики при воздействии на
него значительных кратковременных перегрузок, а также не вносит частотных и
нелинейных искажений в полосе частот и в динамическом диапазоне
полезного сигнала. Однако построить такой усилитель практически невозможно,
поэтому при разработке УБП стремятся реализовать ряд требований к ним.
1 Входное сопротивление усилителя должно быть по возможности не
ниже сопротивления биообъекта с учетом сопротивления перехода кожа – электрод с
тем, чтобы не нагружать источник возбуждения, которым является биообъект.
Например, для съема
потенциалов с биологически активных точек рекомендуется соблюдать выполнение
соотношения Rвх> 1/δ, где Rвх - входное сопротивление
усилителя; δ — максимально допустимая
погрешность измерения; Rimax — максимальное
внутреннее сопротивление источника биопотенциалов, за которое принимают результат
измерения цепи системы «электрод – кожа – электрод». При этом учитывается, что
нагрузка на биологически активные точки может существенно влиять на точность
измерений, изменяя свойства каналов с этими точками. Для других измерительных
систем эти условия могут быть менее жесткими.
Для частот исследуемых сигналов до сотен килогерц (например, при электроемкостных или импедансных
исследованиях) можно учитывать только активные составляющие входных
сопротивлений УБП
Иногда при расчете допустимого значения входного сопротивления
усилителя используют представление о допустимом отношении сигнал/ шум. В этом
случае расчетное соотношение имеет следующий вид:
где Zээ - - паразитное сопротивление приэлектродной зоны (электрод—ткань); ![]() сп - - заданная величина
отношения сигнал/помеха.2 Коэффициент передачи и полоса частот УБП выбираются с
такимрасчетом, чтобы при максимальном размахе
полезного сигнала суммарные полезный сигнал и сигналы всех видов помех не вышли
за пределылинейного участка УБП с целью минимизации
искажений величины сигнала.
сп - - заданная величина
отношения сигнал/помеха.2 Коэффициент передачи и полоса частот УБП выбираются с
такимрасчетом, чтобы при максимальном размахе
полезного сигнала суммарные полезный сигнал и сигналы всех видов помех не вышли
за пределылинейного участка УБП с целью минимизации
искажений величины сигнала.
Искажения, вносимые любыми усилительными устройствами, делятся на линейные и нелинейные. Линейные искажения возникают
вследствие зависимости коэффициента передачи устройства от частоты сигнала.
Эти искажения не изменяются при изменении амплитуды сигнала. Нелинейные
искажения зависят от амплитуды, но не зависят от частоты; они связаны с
нелинейностью амплитудной характеристики передачи усилителя. При регистрации
биопотенциалов с помощью самопишущих приборов возникают дополнительно
динамические искажения. Они появляются тогда, когда скорость изменения
амплитуды сигнала на входе выше времени переходных процессов в устройстве
регистрации. Такие искажения связаны с ограничениями быстродействия схем, то
есть с ограничениями в области верхних частот.
Регистрация неискаженной формы и спектра сигнала позволяет сохранить
максимальную диагностическую информацию в полезном сигнале, особенно в тех
случаях, когда заранее не известны информативные признаки сигнала. Однако
сохранение такого сигнала создает и ряд серьезных трудностей для его
регистрации и последующего анализа. На практике регистрация сигналов в полном
объеме не всегда целесообразна, особенно когда известны информативные параметры.
В этих случаях возможны значительные искажения сигналов, но при условии, чтобы
они не вносили искажения в измеряемый параметр. Так, например, в
исследовательских целях регистрация электрокардиосигнала
производится в диапазоне частот от 0,05 до 800 Гц, для клинических целей — в
пределах от 0,1 до 100 Гц, а при регистрации частоты сердечных сокращений — от
1 до 16 Гц. Нелинейные искажения в первом случае стремятся сделать менее 1 %,
во втором — 5 %, а в третьем — искажения допустимы до 50 %, лишь бы они не
вызывали ошибки пропусков лишних срабатываний выходного формирующего
устройства.
3 Входные каскады усилителя биопотенциалов
строятся с таким расчетом, чтобы обеспечить подавление наиболее существенных
помех иминимальный уровень собственных шумов при достаточно
простых схемотехнических решениях.
Под помехами понимают сравнимые с величиной полезного сигнала
напряжения, присутствующие в отводимых с помощью электродов потенциалах. Помехи
по их виду, происхождению и влиянию на параметры полезного сигнала можно
разделить на аддитивные и мультипликативные.
Аддитивные помехи складываются с сигналом; они вносят наибольшую
погрешность и с ними труднее всего бороться. Они делятся на
синфазные (сигнал среднего уровня) и разностные.
На поверхности тела относительно земли присутствует напряжение
синфазной помехи частотой 50 Гц, амплитуду и фазу которой можно считать
практически одинаковой во всех точках. Инфранизкочастотные
синфазные помехи создаются средним уровнем поляризационных потенциалов
электродов, а среднечастотные — средним уровнем биоэлектрической активности
соседних органов и кожно-гальваническим рефлексом (КГР).
Эти же причины могут привести к возникновению разностных помех,
мгновенные значения которых на входах усилителя равны по величине и
противоположны по знаку. Разностную помеху могут создавать магнитные поля,
пронизывающие контур, образованные проводами, которые соединяют электроды с
усилителем биопотенциалов, а также сильные магнитные поля, воздействующие
непосредственно на усилитель.
Мультипликативные помехи изменяют параметр одного из элементов
контура передачи сигнала (например, сопротивления системы «кожа –электролит - электрод» при высыхании электролита или при
движениях пациента), меняют коэффициент передачи полезного сигнала, вызывая
появление модуляции полезного сигнала помехой.
Значительный вклад в уровень помех вносят электроды, причем не'
только за счет поляризационных эффектов. От конструкции электродов и
используемых материалов зависят собственные шумовые свойства электродов и
интенсивность ряда процессов, происходящих в зоне контакта электрода с объектом
исследования, которые могут явиться причиной интенсивных помех.
Еще одна группа помех связана со свойствами усилителя биопотенциалов.
Поскольку в современных усилителях чаще всего используются схемы на
операционных усилителях (ОУ), то составляющими этой группы являются
погрешности работы ОУ. К ним относят погрешности, возникающие из-за:
нестабильности источников питания Uип; температурного дрейфа Uдр; неточности установки операционных
сопротивлении Uг; конечности величины коэффициента усиления;
конечных значений входных и выходных сопротивлений ОУ и др. Подробнее эта
группа погрешностей будет рассмотрена в литературе, посвященной описанию операционных
усилителей.
Уровень собственных шумов УБП определяется путем деления величины
выходного шумового напряжения при подключении к входу УБП вместо источника
биопотенциалов резистора, равного по величине выходному сопротивлению реального
источника сигнала, на коэффициент передачи усилителя для полезного сигнала.
Основной вклад в шумы УБП вкладывают первые каскады усиления, поэтому их
выполняют на навесных элементах, используя полевые транзисторы или транзисторы
в микрорежиме их работы.
5.1.11 Экранирование и заземление УБП
Напряжение
помех Uп может наводиться и на линии,
связывающей биологический объект с электрофизиологическим прибором, — кабели
отведений, которые обычно представляют собой высокоомные
линии связи, очень чувствительные к емкостным наводкам. Для таких линий велика
опасность больших наводок от осветительной сети (рисунок 5.1.14).
Рисунок
5.1.14 – Схема возникновения помех на линиях связи биообъекта с усилителем
Обозначив
сопротивление паразитной емкости Сп1 между
сетью и проводом 1 через Z1', его сопротивление по отношению к общей точке через Z2', где Z2'
= R'с||Z'вх,
для напряжения помех на этом проводе получим:
![]() ~
~
Аналогично для провода 2
получим:
![]() ~
~
При большом входном
сопротивлении усилителя сопротивления Z2', Z2'' определяются в основном сопротивлениями R'c, R''c входных концов линии. Для ослабления
наводок на провода линии сопротивления R'c, R''c следует уменьшить, что ослабляет
также электромагнитные наводки на линию, которые при больших сопротивлениях R'c, R''c могут полностью подавить полезный
сигнал.
Магнитные
разностные наводки при сближении проводов 1 и 2 ослабляются, так как при этом
уменьшается площадь замкнутого контура, образуемого этими проводами, через
который проходит переменное - магнитное поле, вызывающее разностные наводки.
Одним из выходов для уменьшения наводок является помещение кабелей отведений в
экран, однако при этом увеличиваются емкости отводящих проводов. При
механических перемещениях кабеля паразитные ёмкости проводов могут, хотя и в
малых пределах, изменяться, приводя к появлению шумов экранирования, которые
при малых амплитудах исследуемого сигнала начинают играть существенную роль.
Так, при напряжении наводки 10 В и изменении емкости
на 0,01 % скачки напряжения шумов достигают 1 мВ. Несмотря на экранировку,
кабель играет роль антенны, а при значительной длине он будет вносить основной
вклад в величину емкостей Сп1 и Сп2.
Вообще
говоря, защита усилителя биосигналов от наводок путем
экранирования кабеля отведений — не простая задача. Эта защита будет
эффективнее, если следовать нескольким простым принципам:
- все проводники,
несущие относительно слабый полезный сигнал,должны быть помещены в экран;
- проводник
заземления экрана должен быть подключен к нулевомупроводу
источника возбуждения только один раз;
- при
экранировании низкочастотных шумов в ближней зоне излучения, при защите от
радиопомех это соединение следует подбирать экспериментально;
- экран
и нулевой провод сигнала должны быть заземлены у источника питания в одной
точке;
- заземление, по которому
течет ток нагрузки к источнику питания, должно осуществляться отдельным
проводом, а не объединяться с нулевым проводом сигнала;
- желательно, чтобы
кабель отведений был минимальной длины и при укладке занимал небольшую площадь.
В некоторых
случаях использования УБП эффективным могут оказаться схемотехнические приемы
уменьшения напряжения наводок на входные цепи усилителей.
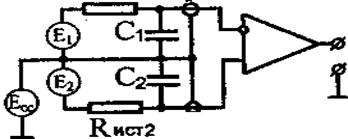
Рисунок 5.1.15 - Схема защиты входной цепи с помощью буферного усилителя
Например,
если на экран подать напряжение, равное синфазному
(рисунок 5.1.14), то синфазное напряжение не будет затухать под влиянием
входных цепей. Это приведет в свою очередь к тому, что не будет разных
затуханий по линиям связи, что улучшит эффект подавления синфазных помех.
Однако такое присоединение экрана может привести к недопустимой нагрузке
источника входного сигнала.
Этот
недостаток может быть устранен в схеме, изображенной на рисунке 5.1.15.
Резисторы R подобраны так, что не нагружают входы усилителей ОУ1
и ОУ2, напряжение в точке соединения этих резисторов приблизительно равно
синфазному напряжению. Повторитель ОУ4 работает как
буферная схема между усилителем (ОУ3) и экраном. Если емкость экрана невелика,
можно обойтись без буферного каскада, а экран подсоединить к средней точке резисторов
R.
5.2
Преобразование измеряемой величины.
5.2.1 Преобразование и усиление
измеряемой величины
. ЦЕЛЬ И
ЗНАЧЕНИЕ ПРЕОБРАЗОВАНИЯ
Измерение
— это сравнение
(нахождение значения физической величины
опытным путем с помощью специальных
технических средств). Не всегда имеется шкала значений сравнительных вели чин (мер), однотипных с измеряемой- поэтому искомые величины должны быть приведены в
соответствие с другой физической величиной, значение которой поддается прямому
измерению. Такое сопоставление называется измерительным преобразованием величины.
Необходимость преобразования возникает также при невозможности передачи и
регистрации измеряемой величины в исходном ее виде. Это справедливо для
большинства задач дистанционного
измерения и регистрации.
Преобразование
измеряемой величины осуществляется в целях унификации различных величин при
осуществлении контроля комплексных систем в природе и в технике.
В большом объеме
преобразование измеряемых величин осуществляется в системах управления. Так,
например, при использовании ЭВМ в системах управления процессами необходимо
представить измеряемые величины в виде электрических импульсов. Измерительное
преобразование, являющееся проблемой, затрагивающей ряд областей наук,
осуществляется многочисленными способами. Процесс преобразования имеет крайне
важное научное и техническое значение; однако в настоящем разделе может быть
представлено лишь несколько типичных примеров. В общем случае процесс
преобразования связан с усилением, т. е. с согласованием уровней мощности
развиваемой измеряемой величиной и достигаемым выходным сигналом
преобразователя.
ОСНОВНЫЕ
ПОНЯТИЯ
Входные сигналы измерительных
преобразователей крайне разнообразны и принципиально не поддаются унификации,
если не рассматриваются нормированные сигналы промежуточных измерительных
преобразователей. Число физических величин, применимых в качестве выходных
сигналов, ограничено. Для преимущественно используемых физических величин —
напряжения, силы тока и давления — имеются соглашения, определяющие амплитудные
диапазоны величин и временные характеристики. Различают аналоговые, частотные и дискретные выходные сигналы.
Аналоговыми электрическими сигналами преимущественно являются
определяемые значениями измеряемой физической величины напряжения и тока.
Аналогово-изменяющиеся сопротивления характерны для датчиков измеряемых
величин. В зависимости от характера выходного сигнала преобразователи могут
представлять собой, например, источник напряжения обычно с ничтожно малым
внутренним сопротивлением или источник тока, обладающий по возможности
бесконечно большим выходным сопротивлением. Соответственно мы говорим о
напряжениях, не снижающихся под нагрузкой, или о
токах, не зависящих от сопротивления внешней цепи. Такие граничные
характеристики преобразователей обеспечиваются благодаря использованию принципов
автоматического регулирования. Часто нулевому значению измеряемой величины
соответствует положительное конечное значение выходного сигнала, например, 4 мА
для токовых сигналов. Это не только позволяет контролировать исправность
действия преобразователя, но и обеспечивает возможность его питания через цепь
выходного сигнала [1].
Преобразователем
может быть также пневматический элемент — источник
давления сжатого воздуха, которое определяется значением входной величины и
лишь незначительно изменяется при изменениях расхода. В измерительных
преобразователях с электрическим выходным сигналом в качестве последнего могут
быть использованы постоянный ток, мгновенные значения которого пропорциональны измеряемой
величине, а также переменный ток и переменное напряжение постоянной частоты с
изменяющейся амплитудой или фазой. Преобразование аналоговых электрических
сигналов в дискретные в настоящее время является
обычной технической операцией. Между представлением измеряемой величины в виде аналогового и в виде дискретного
сигналов осуществляется частотная модуляция, при
которой частотой переменного напряжения или последовательностью
импульсов управляет измеряемая величина, воспроизводимо определяющая значения
этих величин.
Принципиально
измерительный преобразователь может представлять собой каскадную цепочку
звеньев, замкнутый контур управления или их комбинацию.
При каскадном
соединении звеньев сигнал, проходящий последовательно по цепочке, состоящей,
например, из измерительного преобразователя, усилителя и элемента
линеаризации, преобразуется требуемым образом, причем каждое последующее звено
не оказывает влияния на предыдущие. Закон
преобразования качественно и количественно определяется характеристиками всех
звеньев. Отклонение истинных характеристик звеньев от теоретических, а также
возникающие в звеньях погрешности влияют на конечный результат измерений
(согласно законам распространения погрешностей).
Как
показано на рис. 2.3—1, в замкнутом контуре значение входного сигнала хе сопоставляется со значением
аналогичного сигнала обратной связи, выдаваемого звеном 6 обратной связи
и зависящего в свою очередь от значения выходного сигнала усилителя ха. Возникающий в результате сравнения сигнал рас согласования поступает в преобразователь 4 и
усилитель 5, в результате чего контур замыкается. В соответствии с теорией
управления входной сигнал является задающей величиной, выходной сигнал —
управляющим воздействием. Изображенные в нижней части рисунка звенья 4 и
5 представляют собой регулятор, а звено обратной связи 6 — объект
управления.
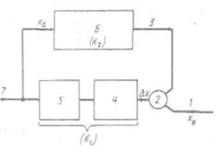
Рис. 5.1 — . Измерительный
преобразователь в виде замкнутого контура регулирования:
1 — входная
величина; 2 — элемент сравнения; 3 — компенсирующая величина; 4
— преобразователь связи; 5 — усилитель; 6 — логический элемент
линии обратной связи; 7 — выходная величина
Справедлива
зависимость:
Xa=k1ΔX; ΔX=Xв-k2Xa из которой
Xa=Xв(k1/(k1k2+1)
При k1k2>> 1 это выражение упрощается Xa~Xв1/k2. При достаточно большом коэффициенте усиления в цепи
обратной связи k1k2 передаточная характеристика измерительного преобразователя определяется только значением k2.
Если не учитывать возмущения,
то зависимость между ха и хе, а также погрешность
преобразования практически определяется только звеном обратной связи 6, т.
е. ошибки этого звена целиком входят в ошибку результата измерения. Коэффициент
усиления в замкнутой цепи ограничен устойчивостью системы. К элементу 6 предъявляется
требование стабильности передаточной характеристики. Так как значение kx не вошло в выражение ха,
то значение выходного сигнала не зависит от нагрузки. Это справедливо и в
том случае, если перед замкнутым контуром установлены дополнительные звенья, т.
е. для определенных сочетаний замкнутого контура и цепочки звеньев. Если
выходным сигналом является сила тока, то она в широком диапазоне не зависит от омического сопротивления внешней цепи;
если выходным сигналом является напряжение, то при изменении
проводимости цепи нагрузки оно сохраняет свое значение.
5.2.2 Аналоговые ключи и мультиплексоры.
Архитектура
ключей и мультиплексоров не сильно изменилась за многие годы, но постоянный спрос на улучшенные
характеристики заставляет производителей разрабатывать все новые и новые
приборы для удовлетворения запросов разработчиков. Достаточно длительное время в качестве
аналоговых ключей использовали МОП (металл-окисел-полупроводник) транзисторы.
Обладая малым сопротивлением в проводящем состоянии и крайне высоким сопротивлением в состоянии отсечки,
с малыми точками утечки
и небольшой емкостью, они были почти идеальными аналоговыми ключами,
управляемые напряжением. Необходимость коммутировать сигналы, равные или близкие по величине к напряжению
питания, заставила решать эту проблему с помощью переключателей на комплементарных МОП-транзисторах
(КМОП). Известная схема 4066 - классическая схема аналогового ключа для сигналов в
диапазоне от «земли» до положительного напряжения питания (фирма Maxim выпускает эту микросхему под названием
МАХ4066). Управляется однополярным сигналом от логических микросхем. Одиночный п-канальный
или р-канальный полевой транзистор, работающий в
режиме обогащения,
может служить аналоговым ключом, но его сопротивление в открытом состоянии будет значительно
зависеть от величины коммутируемого сигнала.
Соединение
п-канального и р-канального
МОП-транзистора в параллель резко снижает эту зависимость.
Необходимо только одно условие - включение и выключение этих транзисторов
должно осуществляться одновременно. Многолетние совершенствования аналогового ключа на
основе КМОП-транзисторов понизили порог напряжения включения до 2,5-5,0 В.
Добавление преобразователя уровня позволило получить сигналы управлния затворами МОП-транзисторов
от входных сигналов логического уровня. При этом аналоговый ключ теперь может
коммутировать аналоговый сигнал уровнем
± 15В.
Зная
тонкости построения ключей, их сильные и слабые стороны, можно найти самое
широкое применение полупроводниковых ключей и мультиплексоров в радиоэлектронной
аппаратуре. Они могут оперировать с радиочастотами до 1 МГц и выше. Большинство аналоговых ключей
выделяют небольшую мощность рассеяния и требуют простого логического
интерфейса. Функционирование ключей зависит от тока сигнала в элементе переключения и для
снижения потерь при передаче, обычно, ограничиваются миллиампеоами.
Для снижения
перекрестных помех на частотах порядка 10 МГц и выше можно использовать ключи (стандартные МАХ312, МАХ383,
видео Т-ключи МА4545), соединенные по Т-образной схеме (рис. 2). Один или два
ключа соединяются на землю с низким сопротивлением (типовое
-40 Ом) и отличным коэффициентом развязки (-80 дБ не 10 МГц). Однако, надо помнить, что с увеличением рабочей частоты сигнала,
перекрестные помехи и развязка становятся неудовлетворительными.
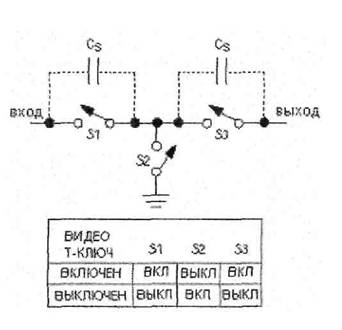
Рис. 5.2.-
Т-образная схема включения ключа для сигнала частотой 10 МГц
Простая
схема генератора на 2 частоты, стабилизируемые кварцевыми резонаторами,
получается при использовании микросхемы с четырьмя ключами (МАХ 383) при питании ±8 В или, при
использовании МАХ 411, ±18 В.
Очень полезными могут быть
интегральные схемы ключей и мультиплексоров при
автоматической установке коэффициента усиления, частоты, фазы или напряжения Например,
если подать сигнал на неинвертирующий вход
операционного усилителя, а яа выходе установить
последовательную резистивную матрицу, то с помощью 16-канального мультиплексора типа МАХ 306, можно выбрать один из 16
уровней коэффи диента усиления. При этом, каждый ключ с одной
стороны подключается к подключается
к инвертирующем входу операционного усилителя.
Обратим
внимание на некоторые технические параметры ключей. Сегодня имеется много аналоговых ключей, работающих с одним
низковольтным источником питания. Применяются и низковольтные ключи с
однополярным питанием и логическими сигналами
по стандартам КМОП и уровнями ТТЛ. Но имеются еще ключи, которые работают
от питания ±15 В или ±12 В. Для управления ими
требуется еще один источник питания,
маркируемый VL, который обычно бывает 5 В или 3,3 В.
Если
логический сигнал находится на уровне V+ (или VL, если имеется), то через аналоговые ключи по существу не течет ток от источника
питания. Применяя ТТЛ-уровни при пятивольтовом напряжении Vr. можно увеличить ток от источника питания более чем в 1000 раз. Чтобы
избежать ненужного потребления тока от источника питания, Вы должны избегать использования ТТЛ-уровней - наследства 1980-х годов.
Время
переключений (t-вкл. и t-выкл.) для
большинства аналоговых ключей наз дится в пределах от 60 нсек. до 1
мсек.
Для «бесщелчковых» звуковых переключателей фирмы MAXIM время переклю чения увеличено до миллисекундного диапазона, что позволят
устранить слышимые звуковые щелчки.
Итак, мы
видим, что для передачи сигнала с минимальными искажениями нужно либо
минимальное сопротивление ключа в открытом состоянии, либо максимально возможная нагрузка на выходе ключа. Рассмотрим еще один
аспект при переключении -эффект инжекции заряда. Для получения низкого
значения Ron
требуется расширение
области канала.
Результатом является большая входная емкость и соответствующая п. та:
увеличение рассеиваемой мощности от тока заряда - разряда в каждом цикле переключения. Постоянное время заряда
t = RxC зависит от сопротивления (Ron) и емкость (С) нагрузки. Обычно это продолжается несколько десятков наносекунд, но
низкоомные ключи имеют более длительную
продолжительность периода включения и выключения Ключи с высоким Ron более быстрые. MAXIM предлагает оба типа ключей - с
одинаковой цоколевкой и в одинаковом корпусе SOT-23. MAX4501 и
МАХ4502 имеют более высокое сопротивление Ron, но короткое время включения/выключения МАХ4514 имеют более
низкое сопротивление Ron, но более длинное время
переключения.
Еще одно отрицательное
последствие низкоомных ключей - более высокий уровень инжекции заряда, вызванный увеличенным
уровнем тока через емкость затвора. Особенно это важно при использовании ключей
в устройствах выборки/хранения для точного преобразования в АЦП.
Защита
ключей от электростатического заряда (ESD) основывается на достижениях MAXIM'a в этой
области. Они позволили увеличить защиту новых аналоговых ключей до ±15 кВт по
рекомендациям IEC 1000-4-2 уровня 4 (самый высокий уровень). Все
аналоговые входы для ESD-тестов используют модель
человеческого тела, а также контакт и разряд через воздушный
зазор. указанные в
методике IEC 1000-4-2.
Так, выпускаемые ключи
МАХ4551 - МАХ4553, совместимы по выводам с большинством стандартных четырех
ключевых микросхем таких, как DS201/211,
МАХ391 и з. Теперь не
требуется делать защиту аналоговых входов с помощью дорогих ограничительных диодов, так как защита от
электростатических разрядов (до 15 кВ) заложена в сему ключей и
мультиплексоров.
Следующую важную
характеристику необходимо отметить у современных ключей. Обычно допустимый диапазон входного сигнального напряжения
ограничивается напряжением на шинах источника питания. Если аналоговый сигнал
превышает напряжение источника питания, то через обратно смещенные
паразитные диоды течет ток. В случае, когда этот ток не имеет ограничения,
микросхема из-за перегрева выходит из строя.
Поэтому, большинство старых ключей и мультиплексоров могли работать с токами,
не превышающими 10÷20 мА.
Новые ключи MAXIM'a имеют
встроенную защиту от пробоя, когда они сохраняют
работоспособность до ±25 В (некоторые до 36 В)
входного сигнала при питании 15 и ±40 В при отключенном питании. В этом
случае (при перенапряжении) по входу налогового сигнала ключ принимает высокое
полное сопротивление независимо от состояния ключа или сопротивления нагрузки.
Только ток утечки, составляющей наноамперы, может
вытекать из источника сигнала. Здесь очень важно одно обстоятельство эти ключи
не требуют определенного порядка подачи напряжения питания и напряжения
аналогового сигнала. Даже при снятом питании не происходит пробоя ключа от налогового сигнала. Защищенные от пробоя ключи
МАХ4511 -МАХ4513 по выводам совместимы с DS411÷DS413.
5.3 АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
(АЦП)
5.3.1 Назначение и применение АЦП в
системах сбора и обработки биомедицинской информации. Классификация и основные
метрологические параметры АЦП
АЦП являются устройствами, которые принимают входные сигналы
(аналоговые) и выдают на выходе соответствующие им цифровые сигналы, пригодные
для работы с ЭВМ и другими цифровыми устройствами.
Процедура АЦ-преобразования непрерывных сигналов представляет собой
преобразование непрерывной функции U(t), открывающий
исходный сигнал, в последовательность чисел {U(tn)}, n=0,1,2,…, отнесеных
к некоторым фиксированным моментам времени. Эту процедуру можно разделить на
две самостоятельные операции:
1) дискретизация,
соответствующая переходу из формы «непрерывное время – непрерывная величина» в
форму «дискретное время – непрерывная величина»;
2) квантование,
соответствующее переходу из формы «дискретное время – непрерывная величина» в
«дискретное время – дискретная величина».
Непрерывный сигнал
представляется в виде взвешенной суммы
![]()
где аn—коэффициент, характеризующий
переходной сигнал в дискретные моменты времени; fn—набор
элементарных функций, используемых при восстановлении сигнала по его отсчетам.
Возможны:
-равномерная
дискретизация (с постоянным периодом);
-аддитивная дискретизация
(с переменным периодом).
В основе равномерной
дискретизации лежит теорема отсчетов, согласно которой в качестве коэффициентов
аn необходимо использовать значение
сигнала U(tn) в дискретные
моменты времени tn=nΔt, а период дискретности выбирается из
условия Δt=1/2Fm, где Fm—максимальная
частота спектра переходного сигнала.
Тогда
![]()
Основные параметры,
характеризующие АЦП и их возможности условно могут быть разбиты на три группы.
Первая определяет статическую точность АЦП, вторая—динамическую,
третья – внешние рабочие условия.
К первой группе
относятся:
- Погрешность квантования – методическая погрешность, вызванная конечным значением шага квантования, обычно равная ±1/2 единицы младшего разряда
(ЕМР).
- Общая аппаратурная погрешность при нормальных условиях выражается как максимальная
аппаратная погрешность, приведенная к полному размаху униполярного или двойному
размаху биполярного входного сигнала.
- Погрешность
смещения нуля – характеризует
параллельный сдвиг всей характеристики квантования реального АЦП по отношению к идеальному.
- Погрешность коэффициента передачи
(изменение крутизны характеристики).
- Нелинейность –
отклонение от идеальной прямой.
- Температурная погрешность.
- Монотонность –
наличие смены знака наклона.
- Разрешающая способность – способность различать два значения входного сигнала.
Ко второй группе
относятся:
- Частота дискретизации (преобразования) – это частота, с которой
происходит образование выборочных значений сигнала.
- Время преобразования – время от начала импульса дискретизации до
появления на выходе устойчивого кода.
- Время выборки (стробирования) – время, в течении
которого происходит образование одного выборочного значения.
- Апертурное время – время, в течении которого сохраняется неопределенность между значением
выборки и моментом времени, к которому она относится.
К третьей группе
относятся:
- Параметры входных сигналов (форма, спектры, амплитуды).
- Параметры источников опорного и питающего напряжения.
- Полное входное сопротивление АЦП.
- Параметры выходных сигналов – логические 0 и 1 (напряжение).
АЦП
используют коды: двоичный, код Грея – изменение только одной кодовой позиции
при переходе от одного кодового значения к другому, код 8-4-2-1, код 2-4-2-1.
5.3.2 Принципы построения АЦП
различных типов и их сравнительные характеристики. Интегрирующие АЦП
5.3.2.1
Последовательный АЦП со ступенчатым пилообразным напряжением.
Рисунок
5.3.2 – Последовательный АЦП со ступенчатым пилообразным напряжение
Рисунок 5.3.2 –
Пилообразное напряжение
Данный АЦП состоит из
компаратора, счетчика ЦАП. На один вход К поступает Uвх, а на другой – сигнал обратной связи Uос с ЦАП (2). Работа преобразователя
начинается с прихода импульса запуска (ИЗ), который включает накопительный счетчик 5. 4 – схема
управления, 1 – источник опорного напряжения, 3 – генератор. Выходной код
счетчика подается на ЦАП, осуществляя его преобразование в напряжение Uос. Процесс преобразования продолжается до тех пор, пока напряжение
обратной связи сравняется со входными и сработает
компаратор, который своим выходным импульсом и осуществляет считывание с него
выходного кода, представляет цифровой эквивалент Uвх в момент окончания преобразования.
Время преобразования:
tпр макс=(2m–1)Δtсч
где m—число
двоичных разрядов; Δtсч—период счетных импульсов.
АЦП данного типа без
устройств выборки и запоминания пригодны для работы с постоянными или медленно
изменяющимися напряжениями, которые за время преобразования изменяются не более, чем на значение шага квантования.
Общие особенности АЦП с
единичным приближением являются небольшие частоты дискретизации (несколько кГц)
и малые статические погрешности.
Достоинства –
сравнительная простота построения.
Область применения –
цифровые вольтметры – тока и цифровая система с медленно меняющимся
напряжением. (tпр»1–100мс)
5.3.2.2 АЦП последовательных приближений
В основе работы такого
АЦП лежит принцип дихотомии, т.е. последовательного сравнения измеряемой
величины с 1/2, 1/4, 1/8 частью и т.д. от возможного максимального значения для
нее. Это позволяет для m-разрядного АЦП выполнить весь
процесс преобразования за m последовательных шагов приближения
вместо 2m–1 при использовании единичных приближений и получить
существенный выигрыш в быстродействии
1—ЦАП, 2—источник опорного напряжения (ИОН),
3—генератор, 4—программное устройство
Рисунок 5.3.3 – АЦП последовательных
приближений
Цифровой эквивалент аналогового Uвх формируется путем пробной установки единицы последовательно
во всех разрядах, начиная со старшего.
К точностным
параметрам АЦП относятся:
- напряжение смещения
нуля – Uсм (ЕМР);
- отклонение коэффициента преобразования от
номинального значения – dпш;
- интегральная
и дифференциальная нелинейность – dл, dлд;
- монотонность
функции преобразования.
dпш—погрешность
преобразования в конечной точке, есть отклонение входного напряжения,
соответствующего конечной точке характеристики преобразования от номинального
значения (ЕМР); dл—максимальное значение систематической погрешности
результатов преобразования ко всему диапазону шкалы, вычисленное относительно
прямой, аппроксимирующей реальную ХП оптимальным образом; dлд—максимальное
отклонение действительных шагов квантования от их среднего значения.
Метод последовательного
счета лежит в основе группы АЦП
косвенного преобразования, в которых Uвх предварительно преобразуется в промежуточную величину
(частоту, длительность и т.д.), которая затем преобразуется в цифровой код. К
ним относятся интегрирующие АЦП. Различают одно- двух- и трех стадийные
интегрирующие АЦП.
По команде пуск
запускается генератор пилообразного напряжения (источник тока, конденсатор,
ключ), открываются схема U и счетчик начинает считать импульсы
с кварцевого генератора. Когда пилообразное напряжение достигает входного
уровня (Uвх), компаратор сбросит триггер, счетчик
остановится и его состояние будет соответствовать выходному коду, который
переписывается в регистр. После чего происходит общий сброс, и схема готова к
(измерению) преобразованию.
При этом Uвых составит значение 0,5Uоп. Если входное напряжение Uвх>U(2), то
единица в старшем разряде сохраняется, в противном случае устанавливается z=0. Затем «1» устраняется в следующем
разряде и процесс продолжается до тех пор, пока не
будет определены цифры всех разрядов. Подобный процесс может быть представлен
как двоичный поиск, начинающийся с середины.
Типовые значения времени
преобразования: от 1 до 50 мкс, при разрядности от 8 до 12.
5.3.2.3 Параллельные АЦП
Осуществляет одновременно
квантование сигнала с помощью набора компараторов, включенных параллельно
источнику сигнала. Пороговые уровни компараторов установлены с помощью
резистивного делителя в соответствии с используемой шкалой квантования. При
подаче на такой набор компараторов Uвх на выходах последних будет иметь
место проквантованный сигнал, представленный в унитарном коде. Для
преобразования этого кода в двоичный используются логические схемы (кодирующая логика).
Быстродействие—100…200 МГц
Рисунок 5.3.4 – Параллельный АЦП
5.3.2.4 Последовательно-параллельные АЦП
Рисунок
5.3.5 – Последовательно – параллельное АЦП
В примере 6-разрядных АЦП
используются два 3-разрядных параллельных АЦП. 1-й—вырабатывает 3 старших
разряды выходного кода. Эти же 3 разряда поступают на ЦАП. Выходной сигнал
последнего подается на один вход устройства вычитания, на другой вход подается
входной сигнал. Разность сигналов с устройства вычитания поступает на второй
3-разрядный АП, вырабатывающий три младших разряда 6-разрядного выходного кода.
Частота
преобразования—10…20 МГц.
5.4 ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ (ЦАП)
Все виды ЦАП можно условно подразделить на две группы:
первая—ЦАП с прецизионными резистивными матрицами; вторая—безматричная.
В первой группе различают
по способу формирования сигнала три типа схем:
с
суммированием токов;
с делением
напряжения;
с
суммированием напряжения.
Из второй группы можно
выделить два типа:
с активными
делителями тока;
стахостические.
Основными
характеристиками ЦАП является разрешающая способность, определяется числом
разрядов N. Теоретически ЦАП, преобразующий N-разрядные двоичные коды, должен
обеспечивать 2N различных значений выходного сигнала с разрешающей
способностью (2N–1)–1. Абсолютное значение минимального выходного
кванта напряжения определяются: 1) как предельным принимаемым числом 2N–1
так и 2) максимальным выходным напряжением шкалы. К примеру, при числе разрядов
12 количество независимых квантов (ступенек) выходное напряжения ЦАП составляет
(212–1)=40 дБ.
Выбранное с помощью
опорного источника напряжения шкалы (Uшк=10 В), разделенное на это число
квантов, дает абсолютную разрешающую способность ЦАП.
![]()
Отличие реального значения разрешающей способности от теоретического
обусловлено погрешностями узлов и шумами ЦАП.
Точность ЦАП определяется
значениями абсолютной погрешности прибора, нелинейностью и дифференциальной
нелинейностью, т.е. теми же параметрами, что и АЦП.
5.5 БИОТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ
5.5.1 Биомедицинские
телеметрические системы для передачи физиологической информации и
удаленного контроля за пациентом. Общие
принципы построения современных систем
Биотелеметрия это область науки и техники, занимающаяся вопросами
дистанционного измерения медико-биологических параметров.
Первая попытка передачи физиологической информации по радиоканалу
была предпринята еще и 1932 г русскими учеными А. Ющенко
и В Чернавкиным. Авторами был сконструирован
радиопередатчик, укрепляемый на спине исследуемого животного или размещаемый на
человеке и позволяющий передать на расстоянии частоту дыхания, частоту пульса
и двигательную активность. Этот первый радиотелеметрический передатчик был
выполнен на лампах, имел значительные габариты и малую мощность. Тем не менее он позволил передать ряд важных физиологических
параметром со свободно передвигающихся объектов.
С изобретением транзисторов, развитием средств связи и созданием
базы микроэлектроники работы по созданию радиобиотелеметрических
систем (РБТМС) различного назначения получили большое развитие
как в России, так и за рубежом.
Первое направление, где наиболее широко стали использовать РПТМС -
это физиология труда и спортивная
медицина. Для медиков, физиологов очень важно иметь данные о функциях организма
непосредственно в условиях той или иной профессиональной деятельности. Цель
этих исследований - оценка и диагностика функционального состояния организма,
разработка мероприятий по обеспечению оптимальных условий его работы, выявление
предельных возможностей человека-оператора по восприятию, переработке
информации и выработке соответствующих реакций, разработка медицинских
требований к системам жизнеобеспечения, экологии, определение оптимальных
методов профотбора, режимов обучения и тренировок и т.д. Насколько важно иметь
информацию о состоянии человека непосредственно в процесс»- его трудовой деятельности, можно проиллюстрировать
следующим примером.
5.5.2 Примеры биотелеметрических
систем: блок-схемы, особенности
построения отдельных сенсоров и каналов
По данным Международной ассоциации гражданской авиации ИКАО более
80 % аварий в авиации происходи по вине человека: диспетчера, руководителя
полетов, пилота. Проблема заключается в
том, что эта категория лиц проходит медицинский контроль только
непосредственно до и после смены. В процессе же работы объективных данных о их психофизиологическом состоянии нет, поэтому невозможно
предусмотреть возможные ошибки в их реакции на ту пли иную ситуацию из-за усталости, ухудшения
самочувствия и т д. Радиобиотелеметрия в принципе
позволяет получить такую информацию, конечно, при условии, что электроды и
радиопередатчик, размещаемый на человеке, не мешает его профессиональной
деятельности
На рисунке 5.1 показана схема РБТМС "Оператор", разработанная
специально для этих целей. Она позволяет регистрировать одновременно семь
физиологических параметров (ЭКГ - в трех отведениях, СФГ, РПГ-2, КГР) у авиадиспетчеров в течение рабочей смены. В
случае выхода оцениваемых параметров за пределы установленной нормы на пульте
управления руководителя полётов и службы
контроля за
безопасностью движения
появляется сигнал тревоги, по результатам анализа
которого принимаются те или иные
оперативные меры вплоть до замены
диспетчера.


![]()
![]()
![]()
1 - радиоперелаюшее
устройство; 2 - радиоприемное устройство: 3 – осциллоскоп; 4 - устройство магнитное
записывающее; 5 - устройство магнитное воспроизводящее; 6 - самопишущий прибор;
7 - блок индикации частоты пульса и базового сопротивления; 8 - блок калибровки
Рисунок 5.1 - Функциональная схема РБТМС
"Оператор"
Биотелеметрия позволила получить новые данные о физиологических
сдвигах при различных видах работ в промышленности, на транспорте, позволила
оценить эффективность мероприятий по нормированию груда, совершенствованию
трудовых процессов. Весьма плодотворным оказалось использование радиобиотелеметрии в спорте для определения оптимальных
режимов тренировок, изучения состояния функций организма в процессе
соревнований, разработки критериев и принципов нормирования физической
нагрузки. Телеметрия позволила получить ранее недоступную информацию о
параметрах ряда физиологических функций непосредственно при выполнении
спортсменами физических упражнений (пловцы, лыжники, бегуны, гимнасты и т. д.).
Большое влияние на развитие биотелеметрии оказала космонавтика. Радиобиотелеметрия явилась одним из основных методов
врачебного контроля за состоянием космонавтов и
животных, находящихся на борту. Первые подобные исследования, проведенные на
космических кораблях "Восток", дали ценную медико-биологическую
информацию. Дальнейшее развитие получила радиобиотелеметрия
при полетах советских космических кораблей "Восход",
"Союз", "Буран" и американских серий "Джеминай", "Аполлон", "Шагл" орбитальных станций "Салют",
"Мир". "Скайлэб" и др.
Одна из важнейших задач биотелеметрии в космонавтике - обеспечение
контроля за основными жизненноважными функциями
организма в процессе космического полета с целью определения опасных для здоровья
и жизни отклонений. Особенно важен медицинский контроль на этапах старта и
спуска, когда наиболее вероятны различные аварийные ситуации. С этой целью
электроды и датчики монтируют непосредственно в скафандр и кресло космонавта
или кабину, где размешается животное, и
через систему космической связи непрерывно передают медико-биологические
данные в центр управления полетом.
На орбитальных станциях биотелеметрия
используется для определения влияния долговременных факторов космического
полета на живой организм и системы жизнеобеспечения, выявления неблагоприятных
сдвигов, прогнозирования заболеваний и возможных патологических состояний. При
этом медицинский контроль осуществляется периодически с предварительной
обработкой и записью на борту необходимой информации с последующей передачей
данных по радиотелеметрическому каналу на землю. В качестве основных функций
организма регистрируются параметры сердечно-сосудистой системы, дыхания,
терморегуляции, нервно-психического состояния, нейрогуморальной регуляции и
др. В таблице 5.1 приведены некоторые наиболее характерные параметры, регистрируемые
в космонавтике для целей медицинского контроля.
Таблица
5.1 - Параметры, регистрируемые в космонавтике для целей медицинского контроля
|
Ðåãèñòðèðóåìûé
ïàðàìåòð |
Òèï ìåäèöèíñêîãî
êîíòðîëÿ |
|||
|
À |
Á1 |
Á2 |
Á3 |
|
|
1 |
2 |
3 |
4 |
5 |
|
ÝÊà â òð¸õ îòâåäåíèÿõ |
1 |
1 |
1 |
0 |
|
ÝÊÃ â 12 îòâåäåíèÿõ |
0 |
0 |
1 |
0 |
|
Òåìïåðàòóðà |
1 |
1 |
1 |
0 |
|
Èìïåäàíñíàÿ
ïíåâìîãðàììà |
1 |
1 |
1 |
0 |
|
ÀÄ |
0 |
1 |
1 |
0 |
|
1 |
2 |
3 |
4 |
5 |
|
ÑÊÃ |
0 |
1 |
1 |
0 |
|
ÐÏÃ |
0 |
1 |
1 |
0 |
|
ÝÝÃ |
0 |
0 |
0 |
1 |
|
ÁÊÃ |
0 |
1 |
1 |
0 |
|
ÔÊÃ |
0 |
0 |
1 |
0 |
|
ÝÌÃ |
0 |
0 |
1 |
0 |
|
Ñåíñîìîòîðíàÿ
ðåàêöèÿ |
0 |
1 |
1 |
0 |
|
Äèíàìîìåòðèÿ |
0 |
0 |
1 |
0 |
|
Áèîýíåðãåòèêà |
0 |
0 |
1 |
0 |
|
Ìàññà òåëà |
0 |
0 |
1 |
0 |
|
Áèîõèìè÷åñêèå
àíàëèçû |
0 |
0 |
1 |
0 |
|
Ðåçóëüòàòû
óëüòðàçâóêîâîé
ëîêàöèè |
0 |
0 |
0 |
0 |
Примечание. А - постоянно действующая
система оперативного медицинского контроля; Б - периодически действующая
система углубленного медицинского контроля и прогнозирования; индексы: 1 - динамический
врачебный контроль (один раз в неделю); 2 - диспансерные наблюдения (один раз в
месяц); 3 - диагностические и парные исследования (по показаниям).
Для построения аэрокосмических
биотелеметрических систем используют либо радиоканал внутри кабины, либо канал
проводной связи. Канал проводной связи используют при подъеме и спуске, а также
при проведении периодического углубленного медицинского контроля на
стационарном участке полета. Для постоянно действующей системы оперативного
медицинского контроля более предпочтительными являются РБТМС с радиоканалом,
поскольку они позволяют космонавту свободно перемещаться внутри корабля,
выходить в открытое космическое пространство и т.д. При использовании
внутрикабинной радиотелеметрии радиопередатчик вместе с электродами и
датчиками располагается в одежде космонавта, а приемник - непосредственно на
борту. После приема медико-биологической информации и ее
оперативной обработки в бортовом приемнике она поступает вместе с другими телеметрируемыми величинами в общую радиолинию для передачи
на землю. При использовании проводного канала на космонавте размещаются (или
подключаются на время эксперимента) непосредственно только электроды и датчики,
с которых информация через соединительный кабель поступает непосредственно на
бортовую оперативную обработку и в радиолинию борт - земля.
При медико-биологических исследованиях
животных в условиях космического полета обычно используют специально оборудованные
кабины-тренажеры, в которых также располагаются необходимые датчики,
преобразователи, устройства передачи. Для съема
физиологической информации в длительном эксперименте используют вживляемые (имплантируемые)
РБТМС.
В последнее время биотелеметрия все
более широко начинает применяться при создании комплексных, автоматизированных
систем управления космическими полетами, разработке космических станций с
экологическими замкнутыми системами, включающими как составное звено и РБТМС.
Кроме авиации и космонавтики большую
роль начинает играть радиотелеметрия и в экологии. С помощью РБТМС впервые был
осуществлен целый ряд важных исследований: физиологические исследования диких
животных и птиц, определение путей их миграции, изучение механизмов ориентации
и поведения.
Принципы построения передатчиков для
подводных биотелеметрических систем БТМС с радиоканалом связи мало чем отличаются от принципов построения передатчиков
наземных систем соответствующего частотного диапазона. Наиболее существенные
отличия заключаются и их конструкции, обусловленной условиями водной среды:
повышенным давлением, а также значительным затуханием радиосигнала в воде.
Последнее обстоятельство приводит к тому, что для обеспечения необходимой
дальности связи даже на небольшие расстояния требуется существенная мощность
передатчика, работающего на очень низких радиочастотах. Технически обеспечить
излучение такого сигнала при жестких ограничениях на массу и габариты
передатчика очень трудно. С другой стороны, многие физиологические параметры, в
частности ЭКГ, ЭМГ, ЭЭГ и др., являются сравнительно высокочастотными для этого
канала, поэтому их передача на нижнем участке диапазона СДВ может оказаться
принципиально невозможной. Все это приводит к тому, что в настоящее время
радиоканал используется при биотелеметрических исследованиях в ограниченных
пространствах (плавательных бассейнах, дельфинариумах
и др.). Дальность связи в этих системах, как правило, не превышает нескольких
десятков метров.
Примером БТМС подобного типа является
система для исследования температуры тела дельфинов. Эта система состоит из ЧМ-мультивибратора и RC-генератора несущей частоты f=55 кГц, который
включается в момент поступления измерительного импульса. В качестве термозависимого элемента мультивибратора использовался
термистор. Передающей антенной служат два платиновых проволочных витка,
представляющих собой вторичную обмотку
выходного трансформатора генератора несущей.
Одним из методов передачи
телеметрической информации с использованием радиоканала в водной среде у
ныряющих животных (киты, дельфины, тюлени и др.) может служить спорадическая
связь, когда передача информации осуществляется в момент их всплытия на
поверхность. При этом антенна располагается обычно в спинном плавнике или в
районе дыхательных отверстий. Однако эти системы требуют применения
специальных запоминающих устройств, существенно усложняющих БТМС.

а - процесс передачи в момент всплытия;
б - передатчик; (1 -
антенна; 2 - коаксиальное
покрытие; 3 - резиновый
колпачок; 4 - радиопередатчик, 5 - источник питания, 6 - датчик)
Рисунок 5.2 - Передача информации с дельфина через
спутниковую связь
Более специфическими являются
гидроакустические системы. Их специфика обусловлена способом получения и
характером распространения акустического сигнала в водной среде, а также видом
искажений и помех, действующих в гидроакустическом канале связи.
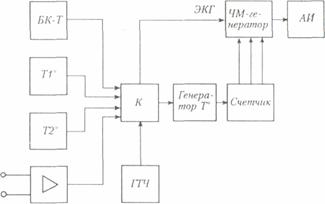
На рисунке 5.3 приведена
гидроакустическая БТМС, предназначенная для передачи ЭКГ и температуры тела в
двух отведениях.
Порядок и временной режим работы данной БТМС задается коммутатором К,
который управляется генератором тактовой частоты ГТЧ. Весь период опроса (Т =
6с) разбивается на два интервала: Т1 =
0...3 с, в течение которого передается информация об ЭКГ, модулирующей
непосредственно ЧМ генератор несущей частоты, и интервал Т2 = 3...6 с, в
течение которого перелаются калибровочный сигнал температуры (блок калибровки
температурного канала БК-1 в течение 1 с) и информация с датчиков температурных
каналов Т1º (1 с} и Т2º (1 с), причем на промежутке Т2 выход
коммутатора К подключается ко
входу ЧМ генератора температурных каналов, частота которых изменяется
пропорционально tº. С выхода последнего сигнал подается
в трёхразрядный счётчик, который фиксирует число импульсов, соответствующее
измеренной температуре. В качестве датчиков температуры и калибровочного
сигнала используются терморезисторы, включаемые в цепь ЧМ генератора
температуры. С выхода счетчика закодированные в цифровую форму значения
температуры поступают на ЧМ генератор и акустический излучатель АИ, который
преобразует электрическое напряжение в акустический сигнал, излучаемый в среду. Рабочая частота сигнала составляет 5,5 кГц,
радиус действия 100...200 м на глубине до 30...40 м.