2 БСИП НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
2.1 РЕЗИСТИВНЫЕ СЕНСОРЫ И
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
В
резистивных датчиках и ИП измеряемый параметр изменяет омическое сопротивление
чувствительного элемента.
К
резистивным датчикам относятся датчики, сопротивление которых изменяется под
воздействием механической величины.
К
резистивным ИП механических величин относятся:
- реостатные датчики;
- тензорезисторы;
- пьезорезисторы.
2.1.1 Реостатные
датчики (РД)
Представляет
собой переменное сопротивление специальной конструкции, движок которого
перемещается под воздействием механической величины.
Рисунок 2.1.1 - Каркас с переменной
высотой реостатного датчика
На каркас намотана
обмотка провода с высоким удельным сопротивлением ρ.
Токосъемник движок
укрепляется на оси. Обмотка делается из:
- манганина;
- константана;
- вольфрама;
- фехраля.
Движок делается из
износостойкого сплава:
- платина-ирридий;
- платина-бериллий.
Сила прижатия: ~10-3–10-4
Н.
Для построения датчиков с нелинейной функцией преобразования используют
каркас с переменной высотой.
Функция
преобразования:
![]()
где х—угол или линейное
перемещение движка.
Изменение
R при перемещении движка на один
виток:
![]()
где ρ1—сопротивление
единичной длины провода; lвит.—длина одного витка;
Рисунок 2.1.2 - Зависимость
выходного сопротивления R1 и R2 от перемещения
Зависимость
высоты каркаса h от
заданной функции преобразования
![]()
Для
линейной функции преобразования ![]() и
и ![]() .
.
Необходимую
функцию преобразования можно обеспечить изменяя шаг
между витками, а так же за счет подключения шунтирующих сопротивлений:
Рисунок 2.1.3 - Схема
подключения шунтирующих сопротивлений
2.1.2 Схемы
включения реостатного датчика
1)
Схема последовательного типа
Чаще
всего применяется потенциометрическая схема:
Рисунок 2.1.4 - Схема
последовательного типа включения реостатного датчика
Обозначим:
U0 –
начальное напряжение при e=0, где ![]() -относительное изменение сопротивления. Тогда:
-относительное изменение сопротивления. Тогда:
![]() ;
;
Обозначим ![]() --коэффициент нагрузки, тогда
--коэффициент нагрузки, тогда ![]() ;
;
И
окончательно приращение выходного напряжения:
![]() ;
;
![]() ;
;
![]()
2) Схема с усилителем
Рисунок 2.1.5 - Схема
включения реостатного датчика с усилителем
Напряжение
на выходе запишется:
![]() ;
;
Здесь также существует начальное
напряжение ![]() ;
;
Приращение выходного напряжения
![]() ;
;
Рисунок 2.1.6 - Схема включения
реостатного датчика с делителем
![]() ;
;
![]() ;
;
![]()
Измерение цепи
последовательного включения и цепи виде
делителя характеризуется нелинейной зависимостью. Между ΔUвых и e, причем погрешность линейности будет
тем больше, чем больше e. При включении в цепь делителя дифференциального
преобразователя погрешность линейности может быть уменьшена при увеличении a и
становится равной нулю при a®¥ (RH®¥). Кривые ![]() для различных
a:
для различных
a:
![]()
Рисунок 2.1.7 - Виды погрешности
линейности
Для обеспечения
линейности приходится значительно отступать от согласованного значения
нагрузки.
Основной недостаток как цепей последовательного включения, так и
цепей в виде делителя является то, что значение х=0 соответствует выходному
напряжению Uвых¹0.
Устраняется применением конденсатора.
Погрешности: Абсолютная погрешность вследствие
нелинейности:
ΔU=UH–UXX;
или приведенная погрешность:
![]()
При a<0,1 γ максимальна при e=2/3 и равна γ≈0,15a. Для
уменьшения погрешности необходимо уменьшать a или увеличивать RH.
Температурная
погрешность:
![]()
При RH®¥ Rt®0.
Реостатному
преобразователю присуща погрешность дискретности.
Приведенная погрешность:
γR=±ΔR/(2R0).
Для линейной функции R(x):
![]() ,
,
где n—число витков в обмотке.
Погрешности обусловленные
изменением силы и момента (трение) вызывают изменение величины гистерезиса ( рисунок 2.1.7).
2. 2 ЁМКОСТНЫЕ И ПЬЕЗОЭЛЕКТРИЧЕСКИЕ
ИП
2.2.1 Принцип действия и конструкция
Емкостной преобразователь
представляет собой конденсатор, электрические параметры которого изменяются под
действием входной величины.
Конденсатор состоит из
двух электродов, к которым подсоединены выводные концы. Пространство между
электродами заполнено диэлектриком. При изменении взаимного положения
электродов или при изменении диэлектрической проницаемости среды, заполняющей
межэлектродное пространство, изменяется емкость конденсатора.
В качестве емкостного
преобразователя широко используется плоский конденсатор. Его емкость
определяется выражением:
![]()
где ![]() - расстояние между электродами;
- расстояние между электродами; ![]() - их площадь;
- их площадь; ![]() - электрическая постоянная;
- электрическая постоянная; ![]() - относительная
проницаемость диэлектрика.
- относительная
проницаемость диэлектрика.
Изменение любого из этик
параметров изменяет емкость конденсатора.
У преобразователя с прямоугольными
электродами (рисунок 2.2.1) ![]() и имеется некоторый
диапазон перемещения пластин
и имеется некоторый
диапазон перемещения пластин ![]() , в котором емкость линейно зависит от
, в котором емкость линейно зависит от
![]() (рисунок 2.2.2).
(рисунок 2.2.2).
Рисунок 2.2.1 - Преобразователь с
прямоугольными электродами
Рисунок 2.2.2 - Зависимость ёмкости
от х
Линейная зависимость
искажается вследствие краевого эффекта. В области линейной зависимости
чувствительность такого преобразователя постоянна и увеличивается с уменьшением
расстояния между электродами:
![]()
Если изменяется расстояние ![]() между электродами,
функция преобразования
между электродами,
функция преобразования ![]() представляет собой
гиперболическую функцию.
представляет собой
гиперболическую функцию.
Чувствительность
преобразователя:
![]()
сильнее, чем в предыдущем
случае, зависит от расстояния между пластинами
![]() . Для увеличения чувствительности
. Для увеличения чувствительности ![]() целесообразно
уменьшить
целесообразно
уменьшить ![]() . Предельное его значение определяется технологическими
соображениями и приложенным напряжением.
Надо учитывать, что при малых
. Предельное его значение определяется технологическими
соображениями и приложенным напряжением.
Надо учитывать, что при малых ![]() возможен электрический
пробой между электродами, (пробой в сухом воздухе при атмосферном давлении
происходит при напряженности
возможен электрический
пробой между электродами, (пробой в сухом воздухе при атмосферном давлении
происходит при напряженности ![]() кВ/см. Однако
расчетное значение напряженности обычно не превосходит
кВ/см. Однако
расчетное значение напряженности обычно не превосходит ![]() кВ/см.).
кВ/см.).
Если перемещать
диэлектрическую пластину в зазоре плоского конденсатора, то можно получить
преобразователь с переменной диэлектрической проницаемостью. Емкость такого
преобразователя определяется как емкость двух параллельно включенных
конденсаторов.
Рисунок 2.2.3 - Преобразователь с
переменной диэлектрической проницаемостью
Один из них ![]() образован частью
электродов и диэлектрической, пластиной, другой
образован частью
электродов и диэлектрической, пластиной, другой ![]() - оставшейся частью
электродов с межэлектродным пространством, не заполненным пластинкой. Если
пластинка с относительной диэлектрической проницаемостью имеет толщину
- оставшейся частью
электродов с межэлектродным пространством, не заполненным пластинкой. Если
пластинка с относительной диэлектрической проницаемостью имеет толщину ![]() , равную расстоянию между электродами, то функция
преобразования преобразователя описывается выражением:
, равную расстоянию между электродами, то функция
преобразования преобразователя описывается выражением:
![]() ,
,
где ![]() - площадь
электродов;
- площадь
электродов; ![]() - часть площади
диэлектрической пластины, находящаяся между электродами.
- часть площади
диэлектрической пластины, находящаяся между электродами.
Емкостные преобразователи
могут выполняться по дифференциальной схеме.
Схема дифференциального преобразователя линейного перемещения с
переменной площадью электродов приведена на рисунке 2.2.4. В таких
преобразователях средний подвижный электрод обычно соединяется с экраном.
Рисунок 2.2.4 - Схема
дифференциального преобразователя линейного перемещения с переменной площадью
электродов
2.2.2 Схемы включения
Емкостный преобразователь
включается в измерительную цепь; при этом изменение его емкости преобразуется
в изменение напряжения или тока либо в частоту синусоидального или импульсного
тока. Существует довольно много различных измерительных цепей включения
емкостных преобразователей. Рассмотрим некоторые из них.
Рисунок 2.2.5 - Резонансная цепь для включения
недифференциального преобразователя
Рисунок 2.2.6
- Изменение напряжения на контуре
Для включения
недифференциального преобразователя может использоваться резонансная цепь (рисунок
2.2.5). Генератор через разделительный трансформатор Т питает резонансный
LC-контур. Емкость контура состоит из емкости преобразователя ![]() и подстроечного
конденсатора емкостью
и подстроечного
конденсатора емкостью ![]() , частота и значение напряжения генератора постоянны. При изменении
емкости напряжение на контуре изменяется по резонансной кривой, как показано
на рисунке 2.2.6. При изменении емкости преобразователя на
, частота и значение напряжения генератора постоянны. При изменении
емкости напряжение на контуре изменяется по резонансной кривой, как показано
на рисунке 2.2.6. При изменении емкости преобразователя на ![]() напряжение на контуре
изменяется на
напряжение на контуре
изменяется на ![]() . Подстроечный конденсатор служит
для настройки контура так, чтобы чувствительностъ
измерительной цепи была максимальной:
. Подстроечный конденсатор служит
для настройки контура так, чтобы чувствительностъ
измерительной цепи была максимальной:
![]()
Чувствительность
резонансной цепи довольно высока и увеличивается с увеличением добротности
контура.
Для включения
дифференциального емкостного преобразователя может быть использована мостовая
цепь (рисунок 2.2.7), работающая в неравновесном режиме.
Рисунок 2.2.7 - Мостовая цепь
включения дифференциального емкостного преобразователя
В этой цепи емкости ![]() и
и ![]() - дифференциальный
преобразователь. На схеме показано также экранирование соединительных проводов
и диагоналей мостовой цепи.
- дифференциальный
преобразователь. На схеме показано также экранирование соединительных проводов
и диагоналей мостовой цепи. ![]() ,
, ![]() ,
, ![]() ,
, ![]() - емкости
соответствующих экранов. Эти емкости включены параллельно активным
сопротивлениям и входят в полные сопротивления плеч моста. Эквивалентные
емкости экранов могут несколько изменяться при работе прибора. Для того чтобы
их изменения мало влияли на выходное напряжение моста, сопротивления
резисторов R должны быть малыми. Емкость
- емкости
соответствующих экранов. Эти емкости включены параллельно активным
сопротивлениям и входят в полные сопротивления плеч моста. Эквивалентные
емкости экранов могут несколько изменяться при работе прибора. Для того чтобы
их изменения мало влияли на выходное напряжение моста, сопротивления
резисторов R должны быть малыми. Емкость ![]() не входит в уравнение
равновесия моста, и ее изменение значительно меньше влияет на его выходное напряжение.
не входит в уравнение
равновесия моста, и ее изменение значительно меньше влияет на его выходное напряжение.
2.2.3 Погрешность емкостного
преобразователя
Электроды емкостного
преобразователя монтируются на изоляционных деталях или разделяются ими.
Разнородные конструктивные детали датчика имеют различные коэффициенты
линейного расширения. При изменении температуры это приводит к изменению
расстояния между электродами. Хотя это изменение мало, оно может быть
соизмеримо с расстоянием между электродами и приводит к температурной
погрешности, имеющей аддитивную и мультипликативную составляющие. Первая может
быть уменьшена применением дифференциальных преобразователей.
Номинальная емкость
емкостных преобразователей обычно лежит в пределах от единиц до сотен
пикофарад. На частоте 50 Гц внутреннее сопротивление преобразователя достигает
значений более ![]() Ом. При столь высоком
сопротивлении возможны погрешности, обусловленные паразитными токами утечки,
причем на результат измерения влияет непостоянство сопротивления изоляции. Для
уменьшения сопротивления Преобразователя частота напряжения питания увеличивается
до нескольких килогерц и выше, вплоть по нескольких мегагерц.
Ом. При столь высоком
сопротивлении возможны погрешности, обусловленные паразитными токами утечки,
причем на результат измерения влияет непостоянство сопротивления изоляции. Для
уменьшения сопротивления Преобразователя частота напряжения питания увеличивается
до нескольких килогерц и выше, вплоть по нескольких мегагерц.
Поскольку полная емкость
преобразователя изменяется в присутствии посторонних металлических предметов, преобразователь, а также идущие к
нему провода и элементы измерительной цепи необходимо экранировать. Однако
емкость экрана может изменяться под влиянием изменения влажности воздуха, вибрации и по другим причинам. Экранированные провода могут изменять свою
емкость при их изгибах, когда
токоведущий провод меняет свое положение относительно экрана. Эти изменения
приводят к погрешности.
2.2.4 Особенности применения
емкостных преобразователей
Емкостные преобразователи
имеют ряд специфических достоинств и недостатков, определяющих область их
применения. Конструкция емкостного датчика проста, он имеет малые массу и
размеры. Его подвижные электроды могут быть достаточно жесткими, с высокой
собственной частотой, что дает возможность измерять быстропеременные величины.
Емкостные преобразователи можно выполнять с заданной (линейной или нелинейной)
функцией преобразования. Для получения требуемой функции преобразования часто
достаточно изменить форму электродов. Отличительной особенностью является
малая сила притяжения электродов.
Основным недостатком
емкостных преобразователей является малая их емкость и высокое сопротивление. Для
уменьшения последнего преобразователи питаются напряжением высокой частоты.
Однако это обусловливает другой недостаток - сложность вторичных преобразователей.
Недостатком является и то, что результат измерения зависит от изменения
параметров кабеля.
Для уменьшения
погрешности измерительную цепь и вторичный прибор располагают вблизи датчика.
Емкостные преобразователи
широко применяются в научно-исследовательской работе, где имеется
высококвалифицированный персонал для разработки, эксплуатации и ремонта
датчиков и вторичных приборов. В условиях научного эксперимента ценным
свойством датчиков является простота их конструкции и технологии.
2.2.5 Пьезоэлектрические
преобразователи
Пьезоэлектрический эффект
был открыт в 1880 году Джексом и Пьером Кюри. Он
заметил, что в некоторых кристаллах при механическом воздействии на них появляется
электрическая поляризация, причем степень ее пропорциональна величине
воздействия. Позже Кюри открыл инверсионный пьезоэлектрический эффект - деформирование
материалов, помещенных в электрическое поле. Эти явления еще называют прямым и
обратным пьезоэлектрическим эффектом
(ПЭЭ).
ПЭЭ присущ некоторым
природным кристаллам, таким как кварц и турмалин. Кристаллическая решетка
кристаллов, обладающих ПЭЭ, не имеет центра симметрии. Воздействие (сжимающее
или растягивающее), приложенное к такому кристаллу, приводит к поляризации
после разделения положительных и отрицательных зарядов. Эффект практически
линейный, т.е. степень поляризации прямо пропорциональна величине прилагаемого
усилия, но направлении поляризации зависимо, так как усилие сжатия или
растяжения генерирует электрические поля, а следовательно, и напряжение,
противоположной полярности. Соответственно, при помещении кристалла в электрическое
поле упругая деформация вызовет увеличение или уменьшение его длины в
соответствии с величиной и направлением полярности поля.
Пьезоэлемент - изготовленная из пьезоматериала
деталь простой геометрической формы
(стержень, пластина, диск и др.) с нанесенными на определенные поверхности
электродами, являющаяся основой пьезоэлектрического преобразователя. Пьезоматериалы - тип материалов, обладающих свойством пьезоэффекта.
Кроме пьезоматериалов естественного
происхождения (кварц), существуют искусственные пьезоматериалы
(пьезокерамика). Пьезокерамика представляет
собой неорганический диэлектрик с высокой диэлектрической проницаемостью, относится
к сегнетоэлектрикам (твердые растворы солей бария BaTiO3 и свинца PbTiO3). Промышленные составы пьезокерамик гостированы по ГОСТ
12370- 72, ГОСТ 13927-74 “Материалы пьезокерамические”. В соответствии с ГОСТом они делятся на 4
класса:
I. - излучатели и приемники малой и средней мощности; высокая чувствительность (ТБ-1, ЦТСНВ -
1, ЦТС - 19) - сегнетомягкая керамика;
II. - большой (ЦТСС - 1, ЦТС - 23) и средней (ЦТБС -
3, ТБК - 3, НБС - 1)
мощности.
Преимущественно излучатели, использующиеся для работы в условиях сильных
механических полей и электрических напряжений -сегнетожесткая;
III.- с повышенной стабильностью частотных характеристик в заданном интервале
температур и времени (ЦТС - 22, НБС - 3);
IV.- высокотемпературная керамика с повышенной стабильностью частотных
характеристик - до +250°С (ЦТС - 21).
В соответствии с
химическим составом пьезокерамическим материалам присваиваются марки, буквы
которых означают химическую формулу, а цифры присваиваются
заводом-изготовителем.
Б - барий; В - висмут;
Ц - цирконий; К - кальций;
С - свинец; Ст
- олово;
Н - ниобий.
Например, ЦТС - цирконат-титанат свинца.
Пьезокерамические
элементы изготавливают методом полусухого прессования, шликерного
литья, горячего литья под давлением, экструзии или изостатического прессования
с последующим обжигом.
Технологический процесс
изготовления пьезокерамических изделий можно разбить на 7 этапов:
I. Синтез материала -
сущность сводится к получению однородного мелкодисперсного продукта с высоким
содержанием требуемого вещества. Исходное сырье - окислы и соли.
II. Изготовление
заготовок - осуществляется прессованием или литьем под давлением. Сухой порошок
пластифицируют, прессование осуществляется в специальных прессформах
при удельных давлениях 5-8 × 107 Па.
III.Обжиг - производят в печах со специальным
градиентом температуры (t °=900-
IV.Механическая обработка - этап непосредственного
изготовления пьезоэлемента. Изготовление заготовки
осуществляется теми же способами, что и обработка металлов: на токарных,
фрезерных и сверлильных станках. Рекомендуются победитовые резцы, сверла и т.д.
Доводка элементов до заданных размеров осуществляется шлифовкой, для доводки по
частоте используют полировку.
V. Нанесение электродов -
осуществляется вакуумным напылением, вжиганием,
осаждением из раствора (химический способ). Материалы для электродов - серебро
(обычно), никель, паладий, индий, медь. Наиболее
распространенный способ - вжигание серебряной пасты:
на обезжиренную поверхность наносят кистью или пульверизатором слой серебряной
пасты, сушат при
VI. Поляризация - процесс
ориентации произвольно направленных доменов вещества в определенном направлении
в сильном электрическом поле при температуре ниже так называемой точки
Кюри. Способы: масляная
и воздушная, высоко- и низкотемпературная, в постоянном или импульсном поле
динамическим методом. Чаще используется масляная или
воздушная в непрерывном постоянном поле.
VII. Выходной контроль пьезоэлементов - визуальный осмотр на соответствие чертежу
и техническим условиям, контроль поляризации, диэлектрических констант,
коэффициента связи.
2.2.6 Классификация пьезокерамических
элементов (ПКЭ)
ПКЭ можно
классифицировать по трем основным признакам:
- геометрическая форма;
- взаимная ориентация
возбуждающего электрического поля и возникающего колебательного
смещения;
- отношение резонансного
размера ПКЭ к другим размерам.
Геометрическая форма и
соотношение размеров выбирают из условий
возникновения одномерных
линейных колебаний.
По геометрической форме
различают две основные группы ПКЭ:
1) прямоугольные
параллелепипеды;
2) тела вращения.
Прочие ПКЭ относят к
элементам специальной формы: трапецеидальные стержни, треугольные пластины и
др.
Все изделия,
изготовленные на базе пьезокерамики, подразделяют на
следующие основные группы: генераторы, датчики (сенсоры), актюаторы
(пьезоприводы), преобразователи и комбинированные
системы.
а) Пьезокерамические
генераторы.
Они преобразуют
механическое воздействие в электрический потенциал, используя прямой пьезоэффект. Примерами могут служить
искровые воспламенители нажимного и ударного типов, применяемые в разного рода
зажигалках и поджигающих системах, а также твердотельные батареи на основе
многослойной пьезокерамики, применяемые в современных
электронных схемах.
б) Пьезокерамические
датчики.
Пьезокерамические датчики
преобразуют механическую силу или движение в пропорциональный электрический
сигнал, то есть также основаны на прямом пьезоэффекте.
В условиях активного
внедрения компьютерной техники датчики являются незаменимыми устройствами,
позволяющими согласовывать механические системы с электронными системами контроля
и управления.
Выделяются два основных
типа пьезокерамических датчиков: осевые (механическая сила действует вдоль оси
поляризации, мода 33) и гибкие (сила действует перпендикулярно оси поляризации
(мода 31)).
В осевых датчиках в качестве пьезоэлементов используют диски, кольца, цилиндры и
пластины. В качестве примеров можно привести датчики ускорения (акселерометры),
датчики давления, датчики детонации, датчики разрушения и т. п.
Гибкие датчики строятся
на основе последовательных (слои керамики имеют противоположную направленность
поляризации) и параллельных (направленность поляризации слоев совпадает)
пьезокерамических биморфов. Наиболее распространены
датчики силы и ускорения.
в) Пьезокерамические актюаторы (пьезоприводы).
Актюаторы строятся на принципе обратного пьезоэффекта и поэтому предназначены для преобразования
электрических величин (напряжения или заряда) в механическое перемещение
(сдвиг) рабочего тела.
Актюаторы подразделяются на три основные
группы: осевые (мода d33), поперечные (мода d31) и гибкие (мода d31). Осевые и поперечные актюаторы
имеют еще общее название — многослойные пакетные, так как набираются из
нескольких пьезоэлементов (дисков, стержней, пластин
или брусков) в пакет. Они могут развивать значительное усилие (блокирующую силу)
до 10 кН при управляющем напряжении 1 кВ, но при очень малых отклонениях
рабочей части (от единиц нанометров до сотен микрон). Такие
актюаторы также называют мощными.
Гибкие актюаторы (биморфы) развивают
незначительную блокирующую силу при малых (сотни микрон) отклонениях
рабочей части. Однако американской компании APC International
Inc. удалось создать и выйти на рынок с новым типом пластинчатого биморфа — «ленточным
актюатором» (зарегистрированная торговая марка).
Ленточный актюатор может обеспечивать блокирующую
силу 0,95 Н и величину отклонения
Гибкие актюаторы
относятся к группе маломощных. К этой же группе будут относиться и
перспективные осевые актюаторы, представляющие собой
моноблок, изготовленный по технологии многослойной пьезокерамики.
Пакетные актюаторы
могут производиться предприятиями, не связанными с производством пьезокерамики. Гибкие же и осевые актюаторы
из многослойной керамики сами по себе являются пьезокерамическими элементами.
Их могут производить только предприятия, владеющие технологиями и оборудованием
для производства пьезокерамических элементов.
г) Пьезокерамические
преобразователи.
Предназначены для
преобразования электрической энергии в механическую.
Так же как и актюаторы, основываются на принципе обратного пьезоэффекта.
Преобразователи
в зависимости от диапазона частот подразделяются на три вида: звуковые (ниже 20
кГц) — зуммеры, телефонные микрофоны, высокочастотные громкоговорители, сирены
и т. п.; ультразвуковые — высокоинтенсивные излучатели для сварки и резки,
мойки и очистки материалов, датчики уровня жидкостей, дисперсионные
распылители, генераторы тумана, ингаляторы, увлажнители воздуха.
Значительной группой
выделяются так называемые ультразвуковые измерители расстояния в воздушной
среде (Air Transducers),
являющиеся пьезокерамическими компонентами. Они используются в качестве
измерителей расстояния для автотракторной техники, сенсоров наличия и движения
в охранных системах, в уровнемерах, для дистанционного контроля и управления, в
устройствах отпугивания птиц, зверей и сельскохозяйственных вредителей и т. д.
Производятся устройства трех типов: передающие, приемные и приемо-передающие;
высокочастотные ультразвуковые — оборудование для испытания материалов и
неразрушающего контроля, диагностика в медицине и промышленности, линии
задержки и т. д.
д) Комбинированные пьезокерамические
системы.
Такие системы преобразуют
электрические величины в электрические, при последовательном использовании обратного и прямого пьезоэффектов.
В качестве примеров таких систем можно привести эхолоты, измерители потоков, пьезотрансформаторы, «искатель ключа».
2.2.7 Конструкции пьезоэлектрических
преобразователей
Достоинствами
пьезоэлектрических преобразователей являются малые габариты, простота
конструкции, надежность в работе, возможность измерения быстропеременных
величин, очень высокая точность преобразования механических напряжений в
электрический заряд. Для кварца, который по своим упругим свойствам близок к
идеальному телу, преобразование механического напряжения в электрический заряд
осуществляется с погрешностью 10-4—10-6. В последние
годы в связи с развитием высокоточной электроники появилась возможность
реализовать эту точность в широком частотном диапазоне и в измерительных цепях,
преобразующих заряд.
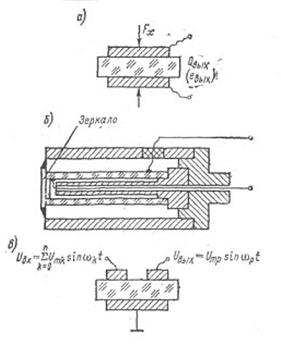
Рисунок 2.2.7
- Конструкции пьезоэлектрических преобразователей
Область применения пьезо-электрических преобразователей
весьма обширна.
1. Преобразователи, в которых используется прямой пьезоэффект
(рисунок 2.2.7 а), применяются в приборах для измерения силы, давления, ускорения.
2. Преобразователи, где
используется обратный пьезоэффект, применяются в
качестве излучателей ультразвуковых колебаний, преобразователей напряжения в
деформацию, например, в пьезоэлектрических реле, исполнительных элементах
автоматических систем, перемещающих
зеркала оптических приборов (рис. 2.2.7, б), обратных преобразователей приборов уравновешивания
и т. д,
3. Преобразователи,
в которых используются одновременно прямой и обратный пьезоэффекты,
- пьезорезонаторы, имеющие максимальный коэффициент
преобразования одного вида энергии в другой на резонансной частоте и резко
уменьшающийся коэффициент преобразования при отступлении от резонансной
частоты, применяются в качестве фильтров, пропускающих очень узкую полосу
частот (рисунок 2.2.7 в).
Пьезорезонаторы, включенные в цепь положительной обратной связи усилителя,
работают в режиме автоколебаний и используются в генераторах. В зависимости от типа кристалла, среза и
типа возбуждаемых колебаний пьезорезонаторы могут
выполняться с высокостабильной, не зависящей от внешних факторов собственной
частотой и с управляемой собственной частотой. Управляемые резонаторы используются
в частотно-цифровых приборах как преобразователи различных, преимущественно
неэлектрических (температура, давление, ускорение и т. д.), величин в частоту.
2.3 ЭЛЕКТРОМАГНИТНЫЕ ИЗМЕРИТЕЛЬНЫЕ
ПРЕОБРАЗОВАТЕЛИ
2.3.1 Принцип действия и конструкция
Индуктивный преобразователь представляет собой катушку
индуктивности ( дроссель) , полное сопротивление которой изменяется при взаимном
относительном перемещении элементов магнитопровода.
Имеются две группы преобразователей: с изменяющейся индуктивностью и с
изменяющимся активным сопротивлением.
Функция преобразования
преобразователя (рисунок 1а) может
быть получена следующим образом. Индуктивность катушки:
L = w Ф / I,
где w – число витков; Ф –
пронизывающий ее магнитный поток; I –
проходящий по катушке ток.
Ток связан с МДС Hl соотношением
I = H l / w.
Подставляя, получим
L = w2 / RM,
где RM
= H l / Ф – магнитное сопротивление преобразователя.
Если
пренебречь рассеянием магнитного потока и нелинейностью кривой намагничивания
стали, то для ИП по схеме рисунка 1а магнитное
сопротивление:
RM
= RCT +
RЗ =
lCT
/ mr
m0 QCT + 2d/m0
Q,
где RCT
– магнитное сопротивление стальных участков магнитопровода;
lCT – длина средней силовой линии по
стальным участкам; QCT – их поперечное сечение; mr – магнитная проницаемость стали; m0 = 4p ´ 10-7 Гн/м – магнитная
постоянная; RЗ – магнитное сопротивление воздушных зазоров, имеющих длину d и сечение Q.
Будем
считать QCT = Q. При этом
индуктивность ИП
L = m0 Q w2 / (2d + lCT / mr ).
Если
пренебречь активным сопротивлением дросселя, то функция преобразователя, т.е.
зависимость электрического сопротивления Z от размера
воздушного зазора d,
выражается зависимостью
Z(d) = j w L = jw w2m0 Q
/ (2d + lCT / mr) » j w
w2 m0 Q / 2d.
В
последнем равенстве имеется в виду, что 2d => lCT / mr вследствие большого значения
магнитной проницаемости магнитопровода. График
функции преобразования индуктивного преобразователя, приведенного на рисунке1а, показан на
рисунке 2.
Под
чувствительностью индуктивного преобразователя понимают отношение
S
= lim (DZ
/ Z) / (Dd)
= (1 / Z) (dZ / dd).
Таким
образом,
S = -2 / (2d + lCT / mr) » 1/d.
Индуктивный
преобразователь является электромагнитом, его сила притяжения, возрастающая с
увеличением чувствительности, нелинейно зависит от перемещения якоря и может
явиться причиной погрешности преобразователя, предшествующего индуктивному.
Описанные
одинарные ИП имеют ряд недостатков: их функции преобразования нелинейны; аддитивные погрешности, в частности, погрешность
реального преобразователя, вызванная температурным изменением активного
сопротивления обмотки, велики; сила притяжения якоря значительна.
Этих
недостатков лишены дифференциальные преобразователи. Они состоят из двух
одинаковых одинарных преобразователей, которые имеют общий подвижный элемент.
Схемы таких преобразователей приведены на рисунке 3.
При перемещении якоря одна индуктивность L1 возрастает, другая L2 – уменьшается. Дифференциальные индуктивные преобразователи
включаются в дифференциальные цепи второго типа. При этом уменьшается аддитивная
погрешность, улучшается линейность функции преобразования, в два раза
возрастает чувствительность и уменьшается сила притяжения якоря.
2.3.2 Схемы включения
Основными
дифференциальными схемами включения ИП являются мостовые схемы, где в общем
случае Z1 = R пр + jw L1 и Z2 = R пр + jw L2 – полные сопротивления секций дифференциальных
индуктивных преобразователей. Сопротивления других плеч могут быть как
активными, так и реактивными. В качестве этих плеч могут служить секции двухобмоточного дросселя или трансформатора с двухсекционной
первичной обмоткой.
Источник
питания U и нагрузка RН могут меняться местами при этом чувствительность
моста также изменяется.
Мосты
проектируют так, что напряжение на измерительной диагонали отсутствует, если на
дифференциальный преобразователь не воздействует входная величина и его якорь
находится в среднем положении. При этом сопротивление плеч Z1 и Z2 равны между собой, их значения
принимаем за Z0. При перемещении якоря сопротивление одной секции становится равным Z1 = Z0 + DZ1, сопротивление другой Z2 = Z0 - DZ2. Изменение
сопротивлений DZ1 = j w DL1 и DZ2 = j w DL2 , соответствующие некоторому
перемещению якоря относительно его среднего положения, в общем случае не равны
между собой в силу нелинейности функции преобразования. Однако, если
перемещение мало, то их различия незначительны. Положим, что при малых
перемещениях якоря относительно его среднего положения изменение сопротивлений
линейно зависит от перемещения якоря x. При этом
DZ1 = DZ2 = DZ.
Изменения
сопротивлений преобразователей невелики, и можно считать, что напряжение на
измерительной диагонали моста изменяется пропорционально DZ / Z. В этом случае функция
преобразования мостовой схемы характеризуется только чувствительностью
Sсх = Uвых / (DZ / Z0),
где Uвых – напряжение на измерительной диагонали при
изменении сопротивления преобразователя, равном DZ.
Чувствит. схемы Sсх , как и вых.
напряж. Uвых , является комплексной величиной. Ее аргумент определяет фазовый сдвиг
напряжения на измерительной диагонали моста относительно напряжения питания. Определим чувствительность для схемы. В режиме
холостого хода, когда RH = ¥,
Uвых,x =
» 2URDZ / (Z0 + R)2,
поскольку | DZ2 |<=| (Z0 + R)2|.
Подставив
значение (Uвых,х) получим
выражение для чувствительности схемы в режиме холостого хода:
Sсх,х = 2U R Z0 / (Z0 + R)2.
Когда
сопротивление нагрузки RH соизмеримо с другими сопротивлениями
цепи, для определения чувствительности Sсх нужно определить напряжение на RH. Согласно теореме об активном двухполюснике это напряжение
Uвых = Ux RH
/ (RH + Zi),
где Z i –
сопротивление мостовой цепи со стороны нагрузки между точками a - b при закороченном источнике напряжения.
Получим:
Sсх = [Ux RH
/ (RH + Zi)] / (DZ / Z0) = (Sсх)x RH / (RH + Zi)
Преобразовав схему
моста получим:
Zi = Z1 R / (Z1 + R) + Z2 R / (Z2 + R).
Подставив
значения Z1 = Z0 + DZ и Z2 = Z0 - DZ и проведя алгебраические преобразования,
в ходе которых считаем |DZ2 |<=| (R + Z0)2| и поэтому пренебрегаем значением DZ2, получим
Zi = 2Z0 R / (Z0 + R).
Следовательно,
чувствительность схемы при включенном сопротивлении нагрузки RH
Sсх = (2URZ0RH) / ((R + Z0)[2Z0R + RH (R + Z0)]).
Аналогично
можно определить выражения для чувствительности других схем. Например,
чувствительность схемы в режиме холостого хода
Sсх,х = U / 2
не зависит от параметров цепи.
Следует,
что напряжение на выходе моста Uвых пропорционально DZ. При изменении знака DZ с плюса на минус также изменяет знак напряжение Uвых . Для переменного напряжения это
соответствует изменению его фазы на 180°.
Можно
показать, что чувствительность схем, может быть выше, чем чувствительность
рассмотренных схем. В схеме имеется возможность согласования сопротивления
нагрузки с выходным сопротивлением моста; цепи питания моста и нагрузки
гальванически не соединены.
2.3.2 Погрешность индуктивных
преобразователей
Температурная
погрешность ИП в основном обусловлена изменением активной составляющей их
сопротивления . Эта погрешность аддитивна и
уменьшается в случае применения мостовых схем. Кроме того, при изменении
температуры изменяется магнитная проницаемость стали,
что приводит к некоторому дополнительному изменению аддитивной и
мультипликативной погрешностей.
При
изменении напряжения питания меняется магнитная проницаемость магнитопровода ИП, а
следовательно, его сопротивление и чувствительность. Изменяется также чувствительность
мостовой измерительной цепи. Изменение сопротивления приводит к аддитивной
погрешности и компенсируется мостовой цепью. Изменение чувствительности создает
мультипликативную погрешность. Для нее уменьшения либо стабилизируют напряжение
источника питания моста, либо применяют компенсационные схемы измерения.
Изменение
частоты питающего напряжения приводит к изменению сопротивления резисторов,
включенных в мост, и меняет чувствительность. Малую погрешность имеют мостовые
схемы , у которых чувствительность в режиме холостого
хода Sсх,х не зависит от параметров цепи. У других схем для
уменьшения погрешности нужно стабилизировать частоту питающего напряжения.
При
перемещении якоря преобразователя изменяется выходное напряжение моста. При
среднем напряжении якоря должно быть Uвых = 0. Однако практически имеется небольшое
напряжение, что приводит к аддитивной погрешности измерительного моста. Для
балансировки мостов переменного тока необходима раздельная регулировка действительной
и мнимой составляющих его выходного напряжения. В мостах с индуктивными преобразователями
одна составляющая регулируется перемещением якоря преобразователя, другая –
путем регулировки других сопротивлений . Если
регулировка сделана недостаточно тщательно, то изменением положения якоря
нельзя полностью сбалансировать схему.
Другая
причина погрешности моста заключается в том, что в питающем напряжении помимо
напряжения с основной частотой имеются составляющие с кратными частотами и с
частотой промышленной сети. Реальный мост переменного тока, питающийся таким
напряжением, полностью сбалансировать трудно вследствие наличия
несбалансированных составляющих с частотами, отличными от
основной.
Для
уменьшения погрешности, обусловленной остаточным разбалансом
моста, используется фазочувствительный выпрямитель.
Его средний выходной ток
I = k U cos j,
где U – подаваемое на вход напряжение; j – фазовый угол между измеряемым и
управляющим напряжением; k – коэффициент пропорциональности,
зависящий от параметров выпрямителя.
Прибор
проектируется так, чтобы напряжение разбаланса моста,
вызванное перемещением якоря преобразователя, было в фазе с управляющим
напряжением, а напряжение, вызванное плохим подбором сопротивлений, было
сдвинуто на угол j = p¤2. При этом выходной
ток выпрямителя будет определятся только перемещением
якоря индуктивного преобразователя.
Фазочувствительный выпрямитель выпрямляет напряжение, имеющее ту же частоту,
что и управляющее напряжение, и частоту его нечетных гармоник. Это значительно
уменьшает аддитивную погрешность, вызванную наличием высших гармоник в
напряжении питания моста.
2.3.4 Трансформаторные
преобразователи. Принцип действия и конструкция
Трансформаторный
преобразователь представляет собой трансформатор, у которого под влиянием
входного сигнала изменяется взаимная индуктивность, что приводит к изменению
вторичного, выходного напряжения.
Различают
два вида трансформаторных преобразователей: с изменяющимся магнитным
сопротивлением и с постоянным магнитным сопротивлением и подвижной обмоткой.
Преобразователи
первого вида конструктивно аналогичны индуктивным преобразователям и отличаются
тем, что вместо одной имеют две обмотки. Так, например, преобразователь состоит
из П-образного магнитопровода
1, подвижного якоря 2 и двух обмоток w1 и w2 . При изменении воздушного зазора d изменяются магнитное сопротивление RM и взаимная индуктивность М. При этом изменяется вторичная ЭДС
Е2 = j w M I1.
Как
известно, коэффициент взаимоиндуктивности
представляет собой коэффициент пропорциональности между потокосцеплением
вторичной обмотки w2 Ф2 и током первичной
обмотки I1:
М = w2 Ф2 / I1.
Ток
катушки возбуждения I1 связан с ее МДС F1 законом полного тока
I1 = F1 / w1,
где w1 – число витков первичной обмотки.
Из
последних равенств следует
М = w1 w2 Ф2 / F1 = w1 w2 / RM *,
где RM* = F1 / Ф2 – взаимное магнитное сопротивление.
Если
рассеяние магнитного потока мало и можно считать, что Ф1
= Ф2, то RM* = RM . Из (20) –(23) следует
Е2 = j w w1 w2 I1 / RM .
Магнитная
цепь трансформаторного преобразователя аналогична магнитной цепи индуктивного
преобразователя (рис.6,а). Поэтому,
подставив выражение (4) в (24), можно получить его функцию преобразования
Е2 = j w w1 w2 I1 m0 Q / (2d + lст / mr).
Пренебрегая
магнитным сопротивлением стали (lст / mr <= 2d), получим
Е2 = j w w1 w2 I1 m0 Q / 2d.
По
выражениям и можно определить Е2, если ток возбуждения I1 не зависит от
перемещения якоря. Однако если преобразователь подключить к источнику с постоянным
напряжением U1 , то при уменьшении, например, воздушного зазора d возрастают индуктивность первичной
обмотки L1 и сопротивление первичной цепи jw L1 , что ведет к уменьшению тока I1 и вторичной ЭДС Е2
. Она будет меньше, чем рассчитанная по выражениям .
Большей
стабильностью первичного тока обладает дифференциальный преобразователь. У
этого преобразователя первичные обмотки соединены последовательно и подключены
к источнику переменного напряжения с постоянным значением U1 , а вторичные включены встречно. Для
упрощения анализа можно считать, что дифференциальный преобразователь состоит
из двух простых. При перемещении якоря сопротивление первичной обмотки Z1 одного простого преобразователя
возрастает, а другого Z2 – примерно на столько же уменьшается. В целом сопротивление первичной
цепи остается почти без изменений, а ток I1 – постоянным и равным
I1 = U1 / (Z1 + Z2) » U1 / (2 jw L0).
Если пренебречь магнитным сопротивлением стали (lст / mr <= 2d0), то
I1 = U1 d0 / jw w12m0 Q,
где w1 – число витков первичной обмотки; d0 – воздушный зазор при среднем положении якоря.
ЭДС
дифференциального преобразователя равна разности ЭДС одинарных:
Е2 = Е21 - Е22.
Подставив,
получим функцию преобразования дифференциального трансформаторного датчика :
Е2 =( j w
w1 w2 m0 Q / d1) I1 - ( j w w1 w2 m0 Q
/ d2) I1 =
= (1/2) (w2 / w1) U1d0(1 / (d0 - Dd) - 1 / (d0 + Dd)) »
» (w2 / w1) U1 Dd / d0,,
где d1 = d0 - Dd и d2 = d0 + Dd, Dd – смещение якоря относительно его
среднего положения.
Функция
преобразователя дифференциального трансформаторного преобразователя линейна при
d02 => Dd2.
Чувствительность
преобразователя
S = E2 / Dd = (1 / d0) (w2 / w1) U1
пропорциональна питающему напряжению U1.
Свойства
дифференциальных трансформаторных преобразователей аналогичны свойствам
соответствующих индуктивных преобразователей.
К
преобразователям с постоянным магнитным сопротивлением и подвижной обмоткой
относятся ферродинамические трансформаторные преобразователи и вращающиеся
трансформаторы.
Схема
ферродинамического преобразователя угла поворота приведена. Он состоит из П-образного магнитопровода 1 с полюсными наконечниками 2. На магнитопроводе
помещена обмотка возбуждения w1. Вторичная подвижная обмотка w2 помещена между полюсными наконечниками. Внутри обмотки w2 для уменьшения магнитного сопротивления
вставляется цилиндрический ферромагнитный сердечник 3. Воздушный зазор между сердечником и полюсными наконечниками
одинаков, также одинакова в воздушном зазоре и магнитная индукция.
Обмотка
w1 включается в цепь переменного напряжения, имеющего
частоту w, и создает магнитный поток. Часть его проходит через
обмотку и наводит в ней ЭДС Е2. При повороте обмотки наведенная ЭДС
изменяется.
Согласно
закону Кирхгофа напряжение U1, приложенное к первичной обмотке w1 равно
U1 = E1 + I1R1 = jw w1 Ф1 + I1R1,
где Е1 – ЭДС самоиндукции; Ф1
– магнитный поток, создаваемый обмоткой w1; R1 – ее активное сопротивление.
Если
это сопротивление пренебрежимо мало и напряжение уравновешивается ЭДС Е1,
то
Ф1 = U1 / j w w1.
Часть
этого потока проходит через вторичную обмотку w2
Ф2 = 2a Ф1 /p,
где a – угол поворота рамки (рис.6,в) и наводит в ней ЭДС
E2 = jw w2 Ф2 = (2a / p)(w2 / w1)U1.
Отсюда
видно, что ЭДС вторичной обмотки пропорциональна углу a.
2.3.4 Схемы включения
трансформаторных преобразователей
Вторичное
напряжение трансформаторного преобразователя может быть измерено любым вольтметром
переменного тока с соответствующим пределом измерения (рисунок
7а). Эта схема отличается
простотой, но применяется редко, поскольку напряжение U2 и , следовательно, показания прибора зависят от первичного
напряжения U1. Кроме того
напряжение U2 зависит от выходного сопротивления преобразователя Zвых. Выходное напряжение
U2 = E2 - I2 Zвых,
где E2 – выходная ЭДС преобразователя; I2 – ток,
потребляемый вольтметром.
С
изменением температуры, частоты питающего напряжения и по другим причинам
выходное сопротивление может изменятся. Это приводит к
погрешности. Погрешность может возникнуть также и вследствие изменения
параметров линии связи между преобразователем и вольтметром.
Лучшими
метрологическими характеристиками обладает схема, показанная на рисунке. Здесь
вторичным преобразователем служит ферродинамический измерительный механизм,
отличающийся от обычных механизмов этой системы тем, что у него нет пружины,
создающий противодействующий момент. Обмотка возбуждения w1 питается тем же напряжением, что и обмотка первичного трансформаторного
преобразователя. Обычно это напряжение промышленной сети. Измеряемое напряжение
подводится к подвижной рамке w2.
Вращающий
момент ферродинамического механизма пропорционален току I2, протекающему в рамке w2, и направлен так, чтобы его
уменьшить. Вращающий момент стремиться повернуть рамку w2. Она поворачивается и
устанавливается в таком положении, когда ее ЭДС Е2К, определяемая выражением, уравновесит
выходную ЭДС Е2
первичного преобразователя. Показания прибора, построенного по этой схеме,
мало зависят от питающего напряжения и его частоты, поскольку при их изменении
одинаково изменяются как выходная ЭДС Е2 первичного преобразователя, так и ЭДС
ферродинамического механизма Е2К.
В
рассуждениях, приведенных выше, пренебрегают моментом трения ферродинамического
механизма. Вследствие трения показание прибора может установиться, когда вращающий
момент сравняется с моментом трения. При этом по рамке будет
течь некоторый остаточный ток и показания прибора будут содержать погрешность.
Поскольку остаточный ток I2 зависит от сопротивлений выходной цепи
преобразователя, то показания прибора в некоторой степени зависят также от
этого сопротивления, однако эта зависимость меньше, чем для предыдущей схемы.
Еще
меньшую погрешность имеют автоматические компенсаторы. Принципиальная схема одного
из них приведена на рисунке. Он включает в себя усилитель переменного тока,
Ферродинамический преобразователь угла ФП и реверсивный двигатель РД. Вал
последнего через редуктор связан с подвижной обмоткой ферродинамического
преобразователя и с устройствами отсчета, регистрации и регулирования измеряемой
величины.
На
вход усилителя подается разность ЭДС первичного преобразователя Е2
и компенсирующей ЭДС Е2К,
которая создается ферродинамическим преобразователем. Усиленное напряжение
приводит во вращение ротор реверсивного двигателя, и Е2К изменяется. Разность Е2 - Е2К
может быть либо в фазе, либо в противофазе с напряжением сети U. В зависимости от фазы ротор
вращается в ту или иную сторону таким образом, чтобы при изменении Е2К разность Е2
- Е2К уменьшалась. Ротор, а вместе с ним и указатель
прибора останавливаются, когда Е2К
= Е2.
Автоматический
компенсатор имеет погрешность значительно меньшую, чем приборы описанные выше.
Класс точности приборов этого типа обычно не хуже 0,5.
В
Государственной системе приборов (ГСП) нормируется изменение коэффициента взаимоиндуктивности трансформаторных преобразователей. При
изменении измеряемой величины в номинальном диапазоне он должен изменятся в пределах 0 – 10, 0 – 20 или 10 – 0 – 10 мГн.
Последние значения получаются при изменении фазы напряжения, что происходит,
например, при изменении воздушного зазора от d1 = d0 + Ddном до d2 = d0 - Ddном.
2.3.5 Погрешность
трансформаторных преобразователей
Причины
погрешностей трансформаторных преобразователей с изменяющимся магнитным
сопротивлением аналогичны причинам погрешностей индуктивных преобразователей.
Аналогичны также методы их уменьшения. Аддитивные погрешности значительно
уменьшаются при использовании дифференциальных преобразователей.
Все
трансформаторные преобразователи имеют также специфические причины погрешности,
обусловленные протеканием тока во вторичных обмотках и изменением их сопротивления.
Это мультипликативные погрешности, уменьшающиеся с уменьшением тока,
потребляемого вторичным преобразователем. Погрешность отсутствует при измерении
ЭДС первичного преобразователя компенсационным методом с помощью
автоматического компенсатора.
Изменение температуры преобразователя вызывает изменение
ЭДС Е2.
При увеличении температуры возрастает активное сопротивление первичных обмоток
и полное их сопротивление. Это уменьшает первичный ток I1 и ЭДС Е2.
2.3.6 Магнитоупругие преобразователи. Принцип действия и
конструкция
Работа
магнитоупругого преобразователя основана на магнитоупругом эффекте. Ферромагнитные вещества имеют
области самопроизвольного намагничивания (домены). В ненамагниченном
состоянии вещества домены ориентированы хаотично и
магнитные моменты отдельных доменов компенсируют друг друга. При помещении
ферромагнитного тела в магнитное поле домены ориентируются в его направления. В
слабом поле ориентация частичная; в сильном поле при магнитном насыщении
материала ориентируются все домены. Ориентация доменов вызывает увеличение магнитной
индукции, характерное для ферромагнитных материалов.
Если
на намагниченный образец ферромагнитного тела воздействовать внешней механической
силой, то тело деформируется, домены изменят свою ориентацию и индукция в
материале изменяется. Явление имеет упругий характер. Если силу снять, то
индукция примет прежнее значение. Поскольку абсолютная магнитная проницаемость
вещества
mа = mr m0 = B / H,
то при заданной напряженности поля H изменение индукции В эквивалентно изменению
магнитной проницаемости.
Изменение
индукции или магнитной проницаемости в ферромагнитных телах при действии на них
силы называется магнитоупругим эффектом.
Рассмотренное
явление используется для преобразования механической силы в электрическую
величину.
Один
из возможных типов магнитоупругого преобразователя
представлен на рис.8,а. Он
представляет собой ферромагнитный сердечник с намотанной на нем катушкой. При
действии силы F в материале сердечника возникает
механическое напряжение s , изменяется mr, следовательно, и магнитное
сопротивление сердечника RМ, а также индуктивность катушки L. Формула преобразований имеет вид
F ® s ® m ® RМ ® L.
Магнитоупругие преобразователи могут иметь две обмотки. Такие преобразователи
являются трансформаторными. При действии силы вследствие изменения магнитной
проницаемости изменяется взаимная индуктивность М между обмотками и ЭДС вторичной обмотки Е. Формула преобразования имеет вид
F®s®mr®RМ®M®E.
При расчете преобразователя и его чувствительности нужно в
соответствии с законами и правилами механики рассчитать механические напряжения
s в элементах конструкции и их
зависимость от измеряемой силы s = s (F).
Зависимость
mr = mr (s) в ферромагнитных веществах в общем
случае нелинейна. Однако при небольших механических
напряжениях можно считать, что относительное изменение магнитной проницаемости
пропорционально s:
h = Dm ¤ mr ном = Sm s,
где Dm = mr -mr ном; mr – значение магнитной проницаемости при воздействии s; mr ном – номинальная магнитная
проницаемость при s = 0;
Sm – чувствительность материала.
Магнитная проницаемость mr ном зависит от напряженности поля Н.
Для увеличения Dm целесообразно
работать при таких Н, при которых mr ном максимальна. Наибольшую чувствительность Sm имеют железоникелевые сплавы,
меньшую – железокобальтовые сплавы и кремниевые стали. Так, электротехнические стали имеют чувствительность
порядка 11×10-9
м2/Н, сталь марки Ст3 – 8×10-9
м2/Н. Имеются сплавы с чувствительностью 25×10-9
м2/Н.
Зная конфигурацию и размеры преобразователя
и зависимость магнитной проницаемости mr от измеряемой силы F, можно
определить зависимость сопротивления магнитной цепи, а также индуктивности L или коэффициента взаимоиндукции М преобразователя:
L = w2 / RM ; M = w1 w2 / RM
.
Магнитопровод преобразователя следует делать без воздушных зазоров. Даже
пришлифованные друг к другу стыки магнитопровода
имеют большое магнитное сопротивление и уменьшают чувствительность
преобразователя. При действии измеряемой силы воздушные зазоры изменяются, что
приводит к возникновению погрешности.
При
низких частотах питающего напряжения или в случае, когда сердечник собран из
достаточно тонких пластин, магнитное поле равномерно заполняет все сечение
преобразователя и поверхностный эффект выражен слабо. При сильно выраженном
поверхностном эффекте магнитное сопротивление увеличивается, а чувствительность
уменьшается.
Лучшими
метрологическими характеристиками обладает магнитоанизотропный
преобразователь, схема которого показана на рисунке 8в. Пока измеряемая сила не
действует, магнитопровод такого преобразователя магнитоизотропен: его магнитная проницаемость одинакова во
всех направлениях. Под действием механических напряжений магнитная проницаемость
изменяется в направлении напряжения. Этот изменяет магнитное сопротивление
материала в том же направлении. Под действием механических напряжений материал
становится магнитоанизотропным.
Преобразователь
собран из пакета пластин, имеющих четыре отверстия. В отверстии уложены две
обмотки: питания w1 и измерительная
w2. Они расположены под углом 45° к направлению действия силы и под
углом 90° друг к другу. При отсутствии измеряемой силы F магнитное поле, создаваемое обмоткой питания w1, направлено параллельно виткам измерительной
обмотки w2 и не заходит в нее (рисунок 9а). В измерительной обмотке ЭДС
не индуцируется. Под действием измеряемой силы магнитная проницаемость в
направлении ее действия изменяется и изменяется магнитное сопротивление в том
же направлении. Это деформирует магнитное поле (рисунок
9б). Магнитный поток
пронизывает измерительную обмотку и индуцирует в ней ЭДС Е2, пропорциональную
действующей силе.
2.3.7 Схемы включения
Магнитоупругие индукционные преобразователи включаются в мостовые
измерительные цепи. В плечо, смежное с измерительным преобразователем,
включается такой же преобразователь для компенсации аддитивных погрешностей. Он
обычно не нагружается – прибор строится по дифференциальной схеме первого типа.
Питание моста производится от феррорезонансного стабилизатора.
Схема включения трансформаторного магнитоанизотропного
преобразователя приведена.
Первичная обмотка 1 питается от
феррорезонансного стабилизатора 2. На
выходе у ненагруженного преобразователя имеется некоторое остаточное
напряжение. Для его компенсации в цепь включен резистор R, на который подается напряжение через фотосдвигающую цепочку 3.
Напряжение питания преобразователя выбирается так, чтобы режим его работы был
близок к режиму насыщения магнитной цепи. При этом на выходе преобразователя
имеется напряжение верхних гармоник значительной величины. Для защиты от
гармоник схема содержит фильтр верхних частот 4. Напряжение выпрямляется двухполупериодным
выпрямителем 5 и подается на
магнитоэлектрический измерительный механизм 6.
Фильтр нижних частот 7 служит для
сглаживания пульсаций выпрямленного напряжения. При измерении быстропеременных
процессов в качестве измерительного механизма включается гальванометр
светолучевого осциллографа.
Магнитоупругие трансформаторные преобразователи могут работать также с
автоматическими потенциометрами переменного тока.
2.3.8 Погрешность магнитоупругих преобразователей
Функция
преобразования магнитоупругих преобразователей , как правило, нелинейна. Имеется
ряд методов уменьшения нелинейности. Нелинейность уменьшается при сокращении
диапазона измерения измеряемой силы; если наряду с измеряемой силой
преобразователь нагружается некоторой дополнительной постоянной силой; при
соответствующем выборе магнитного режима преобразователя; при применении магнитоанизотропных материалов, имеющих различную магнитную
проницаемость в различных направлениях. Такие материалы получают в результате определенной
технологической обработки – ковки, протяжки, прокатки и т.д. Применение этих
мер позволяет уменьшить погрешность, происходящую вследствие нелинейности, до
1,5 – 2 %.
Функция
преобразования при увеличении нагрузки магнитоупругих
преобразователей отличается от функции преобразования при уменьшении нагрузки.
Это отличие имеет гистерезисный характер и обусловлено магнитным и механическим
гистерезисом. При статических измерениях гистерезис
преобразователя больше, чем при динамических. Для уменьшения
погрешности, вызванной гистерезисом, рекомендуется изготавливать преобразователи
из материалов, имеющих возможно больший предел упругости и возможно меньшую
петлю магнитного гистерезиса. Максимальные механические напряжения в магнитоупругом материале должны быть в 6 – 7 раз меньше его
предела упругости. Погрешность, обусловленная гистерезисом, уменьшается после
тренировки преобразователя. Тренировка производится 5 – 10-кратным нагружением силой, соответствующей пределу изменения
преобразователя. Гистерезис может возникнуть также в результате сил трения,
если, например, магнитопровод не сплошной, а
составной. Приведенную погрешность, вызванную гистерезисом, можно снизить до
0,5 – 1 %.
Магнитоупругому преобразователю свойственно старение. При этом изменяется
как магнитная проницаемость, так и внутренне напряжение в материале
преобразователя. Старение приводит к изменению электрических параметров (L, M) и к изменению чувствительности. Изменение
характеристик уменьшается после естественного (в течение нескольких месяцев)
или ускоренного искусственного старения. Характеристики стабилизируются путем
термообработки магнитопровода. Погрешность, вызванную
изменением параметров, можно уменьшить применением дифференциальных
преобразователей и дифференциальных схем включения. Таким образом, погрешность, обусловленную старением, можно уменьшить до
0,5 %.
При
изменении температуры изменяются магнитная проницаемость магнитопровода
и электрическое сопротивление обмоток. При резко выраженном поверхностном
эффекте изменение температуры оказывает меньшее влияние, чем при слабо
выраженном. Для уменьшения температурной погрешности используются
дифференциальные схемы и специальные схемы температурной компенсации.
2.4 МАГНИТО–ЧУВСТВИТЕЛЬНЫЕ СЕНСОРЫ И
ПРЕОБРАЗОВАТЕЛИ
Функциональная
медицинская диагностика является одной из важнейших областей практического
применения методов измерения и анализа электрических, а в последние годы и
магнитных полей организма. Методы диагностики на основе биомагнитных
измерений являются основой концепции построения современной автоматизированной
диагностической системы. В свете имеющихся достижений в области измерительной и
вычислительной техники, а также в области электрофизиологии и биофизики,
математического моделирования электродинамической системы, порождающей
биоэлектрические сигналы, уже сейчас можно говорить о возможности создания автоматизированных
диагностических систем 4-го поколения на основе современных магнитометров.
Именно поэтому разработкой новых видов
оптических датчика магнитного поля активно занимаются крупные научно-исследовательские
центры во всем мире.
Одним из наиболее
перспективных направлений исследования считается разработка новых видов
оптических датчиков магнитного поля на
эффекте Фарадея. В настоящее время научно-исследовательской работой в данной
области занимаются специалисты таких известных компаний, как КDD
(ФРГ), Toshiba ( Япония
), Verbatim и IBM
(США) и многие другие.
В последнее время доминирующее положение в биомагнитометрии
занял сверхпроводящий квантовый интерференционный датчик (СКВИД). Он является
наиболее чувствительным из всех приборов, предназначенных для измерения магнитного
поля. Чувствительность СКВИДа может изменяться от 10-10 до 10-4
Гс.
По своей исключительно
высокой чувствительности СКВИДы находятся практически
вне конкуренции. Однако им присущи и
недостатки - слишком сложная конструкция, высокая стоимость
изготовления и эксплуатации, отсутствие возможности проведения локальных
измерений (вследствие особенностей конструкции ) и,
главное, трудности, связанные с необходимостью поддержания сверхпроводящих
элементов прибора при температурах ниже критической ( до 4 К ).
Рисунок 2.4.1 - Оптический датчик
магнитного поля
Не имеет указанных
недостатков оптический датчик магнитного поля (ОДМП), содержащий многогранный
магнитооптический элемент 1 и концентраторы магнитного потока 2 (рисунок 2.4.1),
позволяющие эффективно концентрировать силовые линии индукции внешнего магнитного
поля непосредственно в магнитооптический элемент параллельно направлению
распространения лазерного излучения. На боковых торцах магнитооптического
элемента 1 выполнен ряд выступов 2 в виде равнобедренных треугольников с углами
при вершине 900, высотой h . По краям одного из торцов со стороны площадки для
выхода 5 светового пучка, выполнены два выступа 3, имеющие вид прямоугольных
треугольников с углом при вершине 450. На всю поверхность (за
исключением площадок для ввода и вывода светового луча) магнитооптического элемента
нанесено светоотражающее покрытие 6. Равновеликие концентраторы магнитного
потока 7 и 8 выполнены в форме правильной усеченной пирамиды, продолжением
большего основания которой является прямая призма, а меньшее основание в
точности повторяет форму соответствующего торца магнитооптического элемента,
находящегося в концентраторе.
На боковых сторонах
концентратора выполнено сквозное отверстие для прохождения светового луча G1-G2. Магнитооптический элемент 1 может
быть выполнен из магнитооптических материалов, а концентраторы 7 и 8 из супермаллоя. Линейно поляризованный луч света Li
попадает в магнитооптический элемент 1 через отверстие для ввода
светового луча G2 и площадку
4. Далее он падает на светоотражающую
поверхность 6 под углом 450. Затем луч света отражается от нее под
углом 900 и по пути А падает
по углом 450 на
светоотражающую поверхность В. Отражаясь
от нее под углом 900, луч света падает на светоотражающую поверхность
С и по пути, равном длине пути А, попадает на светоотражающую поверхность D.
Таким образом, луч света
выходит из магнитооптическиго элемента через площадку
для выхода 5 , пройдя путь равный L . При этом датчик находится в магнитном
поле с индукцией В, подлежащей измерению. Магнитный
поток, проходящий концентраторы и магнитооптический элемент перпендикулярно
площади S1 , большего основания концентратора, остается
постоянной величиной, но концентрация силовых линий поля все более
увеличивается, с уменьшением площади поперечного сечения концентратора, в направлении
магнитооптического элемента и достигает в нем максимального значения. Исходя из
этого зависимость индукции В1 магнитного поля в магнитооптическом элементе
от индукции магнитного поля
В, подлежащего измерению, может быть представлена выражением:
В1=
S1B/ S2,
где
S2 - площадь меньшего основания концентратора. Из формулы видно,
что увеличивая площадь большего основания
S1
концентратора и, соответственно, уменьшая площадь меньшего основания S2 концентратора,
можно увеличить индукцию магнитного поля В, подлежащую
измернию, до величины В1. Предварительные расчеты показывают, что
диапазон измерения датчика составит 10-10
- 103 Гс.
Увеличение
угла поворота плоскости поляризации света, проходящего в магнитооптическом
элементе под действием макнитного поля, за счет
увеличения оптической длины пути, проходимой светом в магнитооптическом материале и действии
магнитного поля по всей длинеэтого пути, а также увеличения индукции магнитного
поля, подлежащего измерению, позволяет значительно увеличить чувствительность и
диапазон измерения оптического датчика
магнитного поля.
В результате появляется возможность измерять слабые магнитные поля, а также
сводятся к минимуму потери света на пути к магнитооптическому элементу и на
выходе из него.
2.4.2 Тонкопленочный
полупроводниковый датчик Холла для измерения магнитной индукции в объеме
головного мозга
Рисунок 2.4.2 - Датчик Холла
Изготовлен на сапфировой подложке по
стандартной планарной технологии. Толщина кремниевой монокристаллической
пленки ( 0,6 ± 0,09)
мкм. В данном случае в качестве основы датчика использовался гетероэпитаксиальный слой кремния n - типа с удельным
сопротивлением 20 - 40 Ом´см, а в качестве токоведущих проводников - тонкие алюминиевые пленки.
Показанная на рисунке структура получена методом фотолитографии. На этой же
подложке изготовлена тонкопленочная микротермопара, которая
может использоваться для измерения температуры или с целью компенсации
температурного дрейфа характеристик датчика Холла. Размеры активной
части микропреобразователя 100´100 мкм, габариты датчика 15´1
мм. Технические испытания датчика показали, что диапазон измерений магнитной
индукции при 25-450 с в
частотном диапазоне от 0 до 100 кГц
находятся в пределах 0,1 - 50
мТл с погрешностью не более 2%. Датчик
размещается в корпусе типа ТО -5. После сборки герметизуется
эпоксидной смолой.
Разработанный датчик
предназначен для измерения магнитной индукции в объеме ( @ 5 мм3)
головного мозга с целью оценки магнитной составляющей излучаемого мозгом
электромагнитного поля. Эти измерения важны в области нейрофизиологических
исследований. В частности, с целью дальнейшего изучения природы электромагнитного
излучения мозга и корреляции параметров этого излучения с деятельностью других
органов и всего организма ставятся опыты, в которых необходимо контролировать
изменения электрических и магнитных характеристик в коре головного мозга. Испытания
датчика на кроликах показали. Что индукция магнитного поля в приповерхностной
части мозга не превышает 2мТл.
2.5 СЕНСОРЫ И ПРЕОБРАЗОВАТЕЛИ
ТЕМПЕРАТУРЫ
2.5.1 Термоэлектрические
преобразователи
Термоэлектрический
преобразователь представляет собой термопару, состоящую из двух разнородных
проводников, на границах которых возникает контактная разность потенциалов,
зависящая от рода металлов и температуры.
Результирующая
электродвижущая сила называется термоэлектродвижущая сила.
![]()
При t1 = t2 Е = 0.
Свойства термопары:
1. Если в цепи термопары включен третий
проводник и его концы находятся при одинаковых температурах t2’= t2”, то включение этого проводника не изменяет ЭДС цепи.
Если концы термопары,
подключенные к соединительным проводам, находятся при одинаковых температурах,
то термоЭДС не изменяется при подключении прибора.
2. ЭДС термопары является функцией
температур ее спаев E = E(t1, t2) и не зависит от температуры других точек термопары.
3. Если термопара имеет температуру
спаев t и t0, то термоЭДС равна алгебраической сумме двух ЭДС, одна из
которых генерируется при t° спаев t и t0’, другая – при температурах t0’ и t0:
![]()
Это свойство используется
при измерении температуры спая t , если температура второго спая t0’ отличается от температуры t0, при которой была произведена градуировка.
При t0 = 0 функция Е(t, 0) представляет собой градуировочную функцию преобразований данной термопары.
Значение Е(t, t0’)
определяется экспериментально, а значение Е(t0’, 0) – по значению температуры t0’ и градуировочной функции
преобразования. По значениям Е(t, t0’)
Е(t0’, 0) вычисляется Е(t0, 0), по которой определяется
измеряемая температура.
Широко используемые
термопары и их основные характеристики приводятся в ГОСТ 6616-84 и ГОСТ
3044-84.
Таблица 2.5.1 - Характеристики
термопар
|
Тип ТП |
Материал электродов |
Обозначение градуировки |
Диапазон измерения, °С |
|
ТХК |
Хромель-нопель |
XK(L) |
-200 ¸ +600 |
|
ТХА |
Хромель-алюмель |
XA(K) |
-200 ¸ +1000 |
|
ТПП |
Платинородий (10%)-платина |
ПП(S) |
0 ¸ 1300 |
|
ТВР |
Вольфрамрений (5%)-вольфрамрений(20%) |
ВР(А)-1 |
0 ¸ 2200 |
Термоэлектрический
датчик обычно называют термопарой. Место соединения электродов называют горячим
или рабочим спаем. Противоположные концы – холодными или свободными. Обычно в
месте свободного спая термопара разомкнута. ЭДС обычно не превосходит 50 мВ.
![]()
2.5.2 Схемы включения
Рабочий
конец помещается в зону измерения, а свободные концы подключаются к вторичному
прибору. Если температура свободных концов постоянна, то подключение может быть
сделано обычным медным проводом, а если не постоянна, то – специальными
компенсационными поводами, в качестве которых используются два провода из различных
материалов.
![]() Провода подбирают так,
чтобы при температуре свободных спаев и в паре между собой они имели такие же
термоэлектрические свойства, как и рабочая термопара.
Провода подбирают так,
чтобы при температуре свободных спаев и в паре между собой они имели такие же
термоэлектрические свойства, как и рабочая термопара.
Компенсационные
провода удлиняют термопару до места, где температура постоянна.
В
качестве вторичных преобразователей используют либо магнитоэлектрические mВ-метры, либо потенциометры постоянного тока
(компенсационные), либо электрокронные mВ-метры с высоким входным сопротивлением.
Рисунок 2.5.1
- Упрощенная схема автоматического компенсационного потенциометра.
RP – реохорд, ИСН – источник стабилизированного напряжения. Основная приведенная погрешность
измерения ±(0,25-1)%, погрешность регистрации ±(0,5-1)%
(при записи на бумагу).
Термопара
Т включается таким образом, что ее ЭДС Е направлена встречно компенсирующему
напряжению ЕК, создаваемому с помощью мостовой цепи. Это напряжение
изменяется пропорционально перемещению движка по реохорду RР . Разность ЭДС термопары и
компенсирующего напряжения Е-ЕК усиливается и подается на
реверсивный двигатель РД. Движок реохорда перемещается и уменьшает разность до
нуля, после чего производится отсчет температуры.
2.5.3 Погрешности ТП
1.
Одна
из основных причин возникновения погрешностей – несоответствие температур
свободных концов термопары температуре, при которой была произведена градуировка.
Номинальная
функция преобразования задается градуировочной
характеристикой (таблицей), полученной при температуре свободных концов t0 = 0° C.
Если при
измерении температура свободных спаев t0’¹ t0, то возникает погрешность, равная Е(t0’,t0). Следовательно, поправка должна быть равна Е(t0’,t0) – по номинальной функции. В общем случае она нелинейна. Но в ряде случаев можно принять поправку Dt=k(t0’ - t0), где k – коэффициент, зависящий от измеряемой Т и от вида термопары
(0,8 ¸ 1,11).
Поправка
может быть введена в автоматический потенциометр с помощью дополнительной
медной катушки, включенной в одно из плеч и имеющей сопротивление Rm = R0 (1+a t0’). Катушка помещена вблизи свободных концов.
2.
Другим
источником погрешности является изменение сопротивление измерительной цепи
термоэлектрического преобразователя (провода, электроды термопары, подгоночные
катушки).Компенсационный потенциометр не имеет этой
погрешности, т.к. I = 0. При Iвх ¹ 0 изменение сопротивления приводит к
дополнительному падению напряжения и погрешности. Приведенная погрешность,
вызванная изменением сопротивления внешней цепи на DRц, равна
![]()
Rц – номинальное сопротивление внешней
цепи mВ-метра; Rв
– внутреннее сопротивление внешней цепи mВ-метра.
Термометры
сопротивления – датчики температуры с терморезисторами.
Терморезистором
называется ИП, активное сопротивление которого изменяется при изменении
температуры.
Имеется
два вида терморезисторов – металлические и полупроводниковые.
Металлические
терморезисторы изготавливают из меди или платитны.
Для медного функция преобразования линейна:
![]()
R0 – сопротивление при t=0ºC, a = 4,28×10-3К-1
– температурный коэффициент.
Функция
преобразования платинового ТС нелинейна и обычно аппроксимируется квадратичным трехчленом. aPt»3,91×10-3К-1.
2.5.4 Конструкции
Чувствительный
элемент медного ТР представляет собой цилиндрический каркас (пластмассовый,
например), по которому намотана проволока Æ
Номинальная
функция преобразования медных и платиновых ТР и их параметры определяются ГОСТ
6551-84. Медные ТР имеют сопротивление от 10, 50, 100 (Ом) и предназначены для
измерения в диапазоне от –200 до +200°С. Платиновые тоже имеют диапазон
сопротивления 10, 50, 100 Ом, а диапазон измерения – -200 до +1000 °С.
2.5.5 Схемы включения
Необходимо
сделать максимально зависящую погрешность от изменения сопротивления
соединительных проводов. Например, может быть использована (при метрологических
работах) компенсационная схема. По этой схеме применяют четырехжильные
платиновые терморезисторы. Провода 1-1 для подвода тока, а провода 2-2 служат
для измерения напряжения Ut на термочувствительной обмотке. Ut измеряется с
помощью потенциометра. Сопротивление терморезистора при этом равно
![]()
R0 – образцовая катушка.
Отсутствует
падение напряжения на проводах, соединяющих ТР с потенциометром, так как по ним
не протекает ток от источника Е.
В менее
ответственном случае используют мосты с ручным или автоматическим уравновешивателем.
Рисунок 2.5.2
- Упрощенная схема автоматического моста
Измерительная
цепь представляет собой мост, состоящий из манганиновых резисторов R1-R3 и терморезистора Rt. Перемещением движка реохода
Rp добиваются уравновешивания моста.
Если мост не уравновешен, напряжение измерительной диагонали усиливается и
подается на РД и,следовательно,
уменьшает напряжение разбаланса.
ТС может
подключаться в мост при помощи 2-х или 3-х проводного
кабеля.
2-х проводной дешевле, но при его использовании сопротивление
обоих проводов включается в одно плечо. Следовательно, при изменении их
сопротивления с температурой возникает погрешность.
3-х
проводная схема обеспечивает включение сопротивления подвода проводов в смежные
плечи моста. Одинаковое изменение их сопротивления практически не разбалансирует
мост. Третий провод необходим для подвода напряжения питания к
ТС.
Сопротивление
ТС определяется его температурой. Последняя зависит не
только от температуры окружающей среды, но и от проходного тока. Следовательно,
ток должен быть достаточно мал. (£ 10-15 мА).
2.5.6 Полупроводниковые ТР (термисторы)
Чувствительный
элемент изготавливают из окислов различных материалов: меди, кобальта, магния,
марганца и др.
(Прессованием
смеси порошков, напыляются электроды, привариваются
выводы, защита краской, стекло или корпус).
Функция
преобразования:
![]()
А, В зависят от материалов,
технологии, размеров и формы.
Номинальное
сопротивление выпускаемых термисторов от 1до 200 К. Диапазон измерения
температуры от -100 до +120-600°С.
Схема
включения – неравновесный или
автоматический мост. Подключается с помощью 2-х проводного кабеля, т.к. R>>Rпров. Приборы имеют индивидуальный
ГХ, что обусловлено большим разбросом параметров и характеристик термисторов.
Достоинства
– дешевы, малые габариты (0,006-
Недостатки
– нелинейность функции преобразования, большой разброс параметров, старение,
некоторая нестабильность параметров.
Применяются
для измерения температуры, когда не требуется высокая точность, но требуется
измерение температуры малых объектов, быстроизменяющихся температур. Широко
используются в медицине и биологии. Могут быть вмонтированы в острие иглы.
Применяются для температурной коррекции характеристик приборов (в качестве
датчика температуры).
2.6
ОПТОЭЛЕКТРОННЫЕ СЕНСОРЫ И ПРЕОБРАЗОВАТЕЛИ
2.6.1 Общие принципы построения
и классификация оптоэлектронных
преобразователей и их характеристики
ФЭП представляет собой
фотоэлектронный прибор (фотоэлемент, фотоприемник), преобразующий световую
энергию (электромагнитное излучение чаще видимого и инфракрасного спектра) в
электрический ток.
Три типа ФЭП:
1.
с
внешним фотоэффектом;
2.
с
внутренним эффектом;
3.
фотогальванические
К первому типу относятся
вакуумные и газонаполненные ФП и фотоэлектронные умножители.
Вакуумные ФП состоят из
вакуумной стеклянной колбы, содержащей два электрода: анод и катод. При
освещении фотокатода под влиянием фотонов света он эмитирует электроны. При
наличии внешнего напряжения электроны образуют электрический ток, называемый
фототоком.
Для фотоэмиссии
электронов необходимо, чтобы энергия фотона ![]() (ν
– частота света; h –
постоянная Планка) была больше работы выхода электронов Ф,
характерной для данного материала фотокатода. Частота
(ν
– частота света; h –
постоянная Планка) была больше работы выхода электронов Ф,
характерной для данного материала фотокатода. Частота ![]() называется красной
границей фотоэффекта, а соответствующая ее длина волны
называется красной
границей фотоэффекта, а соответствующая ее длина волны ![]() ( с
– скорость света) – длинноволновым порогом фотоэффекта. Если
( с
– скорость света) – длинноволновым порогом фотоэффекта. Если ![]() , то никакая интенсивность света не может вызвать фотоэффект.
, то никакая интенсивность света не может вызвать фотоэффект.
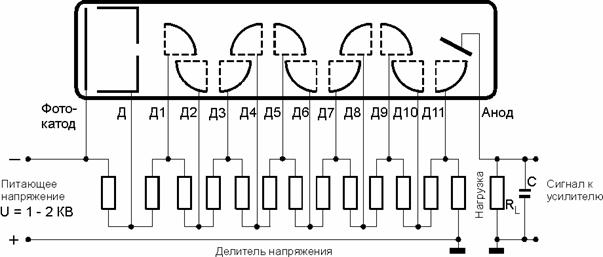
Рисунок 2.6.1 - Делитель напряжения
ФЭУ – это вакуумный ФЭ
снабженный системой электродов для усиления тока фотоэмиссии.
Напряжение на диноде
таково, чтобы энергии фотоэлектрона было достаточно для вторичной эмиссии
электронов. При вторичной эмиссии испускается больше электронов, чем падает на
динод.
ФЭУ имеют высокую
чувствительность и используются для измерения малых световых потоков (до 10-15
лк).
2.6.2 Фотоэлектрические
преобразователи (фоторезисторы, фотодиоды, фототранзисторы и др.):
принцип действия, основные параметры, особенности применения и схемы
их включения.
Ко второму типу относится
полупроводниковые фоторезисторы, фотодиоды, фототранзисторы.
В качестве
фоточувствительного материала используется сернистый кадмий, селенистый кадмий
или сернистый свинец.
Электропроводность ПП
материалов обусловлена возбуждением электронов в валентной зоне и примесных уровнях. При возбуждении электроны переходят в
зону проводимости; в валентной зоне появляются дырки. Красная граница
фоторезисторов находится в инфракрасной области, например, для
сернисто-свинцовых λгр = 2.7 мкм. Его электрическая проводимость:
![]()
где ![]() – фототок, U –
напряжение.
– фототок, U –
напряжение.
Рисунок 2.6.2 - Вольт-амперная
характеристика
Чувствительность фоторезисторов определяется
кратностью изменения их сопротивления.
![]()
где RT
– темновое сопротивление, R200 – при 200 лк.
ВАХ – вольт-амперная
характеристика линейна, т.е. сопротивление не зависит от приложенного
напряжения. Инерционность характеризуется постоянной
времени τ. У сернисто-кадмиевого ![]() . У селенисто-кадмиевого
. У селенисто-кадмиевого ![]() . Сопротивление зависит от to, поэтому они включаются в смежные
плечи моста.
. Сопротивление зависит от to, поэтому они включаются в смежные
плечи моста.
Фотодиоды и
фототранзисторы – полупроводниковые фотогальванические преобразователи. Для
построения ФД могут быть использованы одно- и двухэлементные полупроводники (Ge, GeAs, InP и др.). В полупроводниках из трех
или четырех элементов группы A-B периодической системы элементов (Ga1-xAlxAsx; InxGa1-xAsyP1-y) благодаря регулировке соотношения x и y различных составляющих можно
изменять значение Ey (энергии запрещенной зоны) и таким
образом создавать фотодетектор с определенной длиной волны в широком световом
диапазоне.
Рисунок
2.6.3 -
Если, используя ПП типа n и p создать p-n переход, то даже когда на него извне
не подается никакого электрического напряжения, внутри перехода возникает
электрическое поле.
При освещении p-n перехода электроны ковалентной зоны,
поглотившие его, переходят в зону проводимости и таким образом формируются
свободные электроны и дырки.
Под действием внутреннего
ЭДС они направляются в сторону слоя n или p, т.е. возникает электрический ток.
Фотодиоды могут работать
в фотодиодном и генераторном режимах. В фотодиодном режиме прибор подключен к
запирающему напряжению. При увеличении освещенности возрастает обратный ток,
что приводит к увеличению напряжения Uн на Rн. Внутренне дифференциальное сопротивление ФД имеет
величину порядка мегомов, поэтому он работает в режиме близком к КЗ.
Рисунок
2.6.4 -
Сила фототока выражается
следующей формулой
![]()
где e – заряд электрона; P0 – мощность
падающего света; hν –
энергия фотона; η – квантовый выход.
Отношение сигнал/шум:
где Id
– темновой ток, B – частотная
полоса, k – коэффициент Больцмана; T – температура; Re
– входное сопротивление усилителя; F –
коэффициент шума этого каскада.
Числитель определяет
мощность сигнала, первый член знаменателя дробовой шум, обусловленный
временными флуктуациями частоты возникновения электронов под воздействием
света, а второй член знаменателя – мощность тепловых шумов в усилителе.
Рисунок 2.6.5 - Генераторный режим
включения фотодиода
Чувствительность
обнаружения, определяемая при условии ![]() , приблизительно равна 0.5 мкВт.
, приблизительно равна 0.5 мкВт.
В генераторном режиме
фотодиод включен по схеме и он сам является источником
тока.
Неотъемлемым элементом
оптоэлектронных датчиков являются светоизлучающие приборы: светодиоды и лазеры.
Светодиоды являются
примером некогерентного источника света. Основой такого источника служит ПП с
прямым переходом (GaAs). Слой GaAs c p проводимостью охвачен с обеих сторон
слоем p-типа AlxGa1-xAs и слоем n-типа AlyGa1-yAs. Это – двухслойная гетероструктура. Из слоя n-типа в слой GaAs инжектируются электроны, накапливаются там и затем переходят
в зону валентных электронов, генерируя спонтанное излучение.
Рисунок 2.6.6 - Пример некогерентного
источника тока
Мощность излучения от
единиц до 100 мВт при токе 100 … 200 мА. Угол рассеяния до 180°.
Для повышения эффективности к светодиоду
приклеивается миниатюрная линза.
С помощью тока
(инжекционного) можно модулировать мощность излучения, частота модуляции
ограничена значением:
![]()
где ![]() - время перехода
инжектированных носителей.
- время перехода
инжектированных носителей.
Для получения лазерных
колебаний рассмотренную структуру светодиода необходимо поместить в резонатор Фабри-Перо. Ширина и высота активного слоя делаются малыми
~2мкм и электроны запираются в резонаторе типа волновода с прямоугольным поперечным
сечением, ограниченным размерами вдоль осей x и y. Т.е. активный слой соответствует
оптическому волокну, а свет, запертый в нем, распространяется, как в волноводе.
2.6.2
Дифференциальные схемы включения с
двумя и одним преобразователем.
Для уменьшения
погрешности измерения ФЭП включается в дифференциальные или компенсационные
измерительные цепи.
Рисунок 2.6.7- Схема измерения
концентрации раствора в кювете 2
Схема данного измерения
концентрации раствора в кювете 2. Из-за разброса характеристик ФС каналы дифф. цепи несколько отличаются друг от друга
и компенсация получается неполной. Поэтому меньшую погрешность имеет схема.
Рисунок 2.6.8- Схема измерения
концентрации раствора в кювете 2
2.6.3
Волоконно-оптические датчики: принцип действия, типы,
воспринимаемые физические величины.
Современные ВОД позволяют
измерять почти все. Например: давление, температуру,
расстояние, положение в пространстве, скорость вращения, скорость линейного перемещения,
ускорение, колебания, массу, звуковые волны, уровень жидкости, деформацию,
коэффициент преломления, электрическое поле, электрический ток, магнитное поле,
концентрацию газа, дозу радиационного излучения и т.д.
Основной элемент ВОД –
волокно. Если классифицировать ВОД с точки зрения примененного в них
оптического волокна, то, они разделяются на датчики, в которых волокно
используется:
1) в качестве линии передачи
2) в качестве чувствительного элемента
В
первых
используются в основном многомодовые ОВ, а во вторых
(сенсорного типа) – одномодовые ОВ.
А) ступенчатое многомодовое:
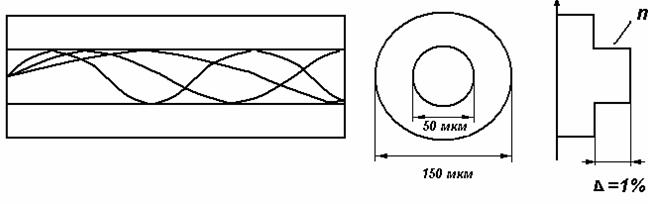
Рисунок 2.6.9 - Ступенчатое многомодовое ОВ Б) градиентное многомодовое:

Рисунок 2.6.10 - Градиентное многомодовое ОВ В) одномодовое
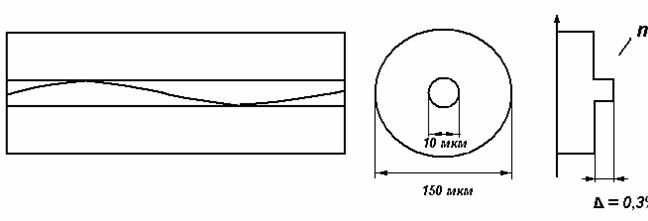
Рисунок 2.6.11- Одномодовое
ОВ Скорость распространения моды вдоль оси волокна:
![]()
где ψ – угол распространения моды, который увеличивается по
мере возрастания порядка моды. При этом скорость ее распространения
уменьшается.
Частотная полоса B сигнала, который можно передать по
ступенчатому многомодовому ОВ, определяется выражением
![]()
где ![]() - разность во времени
между распространением моды самого высокого порядка и модой самого низкого
порядка.
- разность во времени
между распространением моды самого высокого порядка и модой самого низкого
порядка.
Если Δ=1%, n1=1.47, то B=20МГц*км. Для
градиентных волокон ![]() меньше, чем для
ступенчатых:
меньше, чем для
ступенчатых:
![]()
При Δ=1%, n1=1.47, B=4,1 ГГц*км.
У одномодовых
волокон отсутствует временная разность в распространении мод, поэтому они
чрезвычайно широкополосны (в несколько сотен раз
более, чем градиентные).
Наиболее важным свойством
ОВ при использовании в качестве чувствительного элемента в сенсорах является
характер изменения фазы распространяющегося по волокну света под влиянием
механического давления, температуры, магнитного и электрического поля.
При небольшой относительной
разнице коэффициентов преломления в ОВ фаза φ
равна:
![]() ,
,
где β – коэффициент изотермического сжатия.
Относительное изменение
фазы
![]()
Из формулы можно сделать
предположения о чувствительности датчика при измерениях давления, температуры,
магнитного и других полей.
Зависимость изменения
фазы от степени деформации ОВ.
Изменение коэффициента
преломления стекла
![]()
где первый член учитывает изменение
плотности стекла, второй – эффект фотоупругости,
обусловленный давлением или температурой.
Для кварцевого стекла
![]()
![]()
где Pij –
коэффициент Поккельса (фотоупругость);
ν –
отношение Пуассона; ![]() εz – деформации вдоль оси ОВ; εП
– поперечная деформация.
εz – деформации вдоль оси ОВ; εП
– поперечная деформация.
При λ=0,546 n=1,46 p11=0,121 p12=0,270 ν=0,164. Подстановка в исходную
формулу даст:

Рисунок
2.6.12 - Изменение коэффициента
преломления стекла
Таким образом, чтобы
вычислить чувствительность ВОД, необходимо определить деформацию вдоль ОВ,
обусловленную конкретным воздействием.
Чувствительность ОВ к давлению
с пластмассовым покрытием:
Данные ОВ к давлению с
пластмассовым покрытием. Данные ОВ: сердечник 4,5 мкм, оболочка 1 – 30 мкм,
оболочка 2 – 85 мкм, оболочка 3 – 200 мкм, h = пластмасса 4 0-700 мкм.
Оптические элементы ВОД.
1. Стержневые линзы. Имеют
цилиндрическую форму с плоскими торцевыми поверхностями. Свойства линзы
обеспечиваются за счет сформированного в ней распределения коэффициента
преломления (по квадратичному закону):
![]()
где g – параметр
фокусировки [мм-1].
Траектория
светового луча внутри линзы имеет синусоидальную форму. Шаг P этой траектории равен 2π/q и является основным параметром
линзы. Обычно длина линзы z равна P/4 и P/2.
Диаметр
2r = (1..2) мм, L = (3..6) мм, параметр фокусировки
0,2 … 0,5 мм-1.
Рисунок
2.613 - Стержневая линза
2.
Призмы.
Используют для изменения направления лучей
Рисунок 2.6.14 - Призмы
3.
Поляризационные
призмы. Рошана (луч со случайной поляризацией
разделен на 2 перпендикулярных поляризационных
необыкновенных луча).
Рисунок 2.6.15 - Поляризационная призма
4.
Фазовая
пластина.
Рисунок 2.6.16 Фазовая пластина
![]()
где n0 и ne – коэффициент преломления для
обыкновенного и необыкновенного лучей. Обычно
![]()
2.6.5 Направления применения
оптоэлектронных датчиков в медицине
и биологии.
В настоящее время интенсивно разрабатываются
волоконно-оптические датчики-преобразователи параметров различных
физических полей. Это связано с потребностями многих отраслей
науки и производства, а также с их широкими возможностями и
большими преимуществами. ВОД обладают высокой избирательностью, т.е. чувствительностью
к измеряемому параметру и нечувствительностью к другим факторам.
Они характеризуются также высокой помехозащищенностью по заданному
параметру. На них практически не влияет температура,
влажность и другие факторы окружающей среды. На оптические
сигналы, передаваемые от датчиков к измерительно-преобразовательной аппаратуре,
не действуют электромагнитные помехи, что очень важно при их эксплуатации
на транспорте и в промышленных условиях с интенсивными пусковыми
токами или высокочастотными полями.
Существенной особенностью ВОД является
то, что они могут быть локальными (измеряющими поля в точечных объёмах
размером
Перечисленные свойства ВОД раскрывают
возможности для их широкого применения в научных исследованиях, системах
экологического мониторинга и системах технологического контроля крупных предприятий.
Волоконно-оптические датчики-преобразователи для
измерения давления, температуры, вибраций,
ускорения, расстояния и скорости перемещения уже разработаны и применяются . Датчики
электрических и магнитных полей, которые рассмотрены в настоящей работе,
разработаны только для частных
случаев .
2.6.6 Эффекты, используемые
в оптоэлектронных
биосенсорах.
Волоконно-оптические датчики-преобразователи
электрических и магнитных полей обычно
разрабатывают на основе следующих электро- и магнитооптических эффектов:
электроупругости
(механической деформации с изменением показателя преломления);
изменения разницы показателей преломления по
разным осям анизотропии в кристаллах без центральной симметрии (эффект Поккельса);
квадратичного электрооптического эффекта
(эффекта Керра),
магнитострикционного эффекта (механических
деформаций под действием магнитного поля),
вращения плоскости поляризации света в среде
под действием магнитного поля (эффекта Фарадея).
Измерение напряженности электрических
полей:
Электрооптические эффекты связаны с
изменением условий распространения света в среде, обусловленным зависимостью
показателя преломления п под действием электрического поля с напряженностью £. Функциональная связь между этими величинами может быть
представлена в виде:
1/п2 - l/n0 + rЕ + RЕ2...+...,
где п0 - показатель
преломления при Е—0 , r и R - коэффициенты Поккельса и
Керра, соответственно.
Линейный злектрооптический
эффект Поккельса проявляется в
анизотропных кристаллах. Разность фаз двух поляризационных
компонент d, возникающая при прохождении света вдоль оси <001>
в кристалле LiNb, к
которому
приложено напряжение U, направленное вдоль оси <100>, можно представить
соотношением :
d =(2p/l) п03 g22 (L/d) U
где l -
длина волны света, g22 -электрооптический коэффициент
Поккельса
(для LiNb g22= 7×10-10
рад.см/В), d - толщина кристалла LiNb, L - длина оптического пути в
кристалле.
В ВОД наиболее часто используются следующие материалы с высоким
эффектом Поккельса :
Оксидные монокристаллы тригональной
симметрии: LiNbO3 (LNO), LiTaO3 (LTO);
Полупроводниковые
соединения кубической структуры: ZnS, ZnTe; . Оксидные
материалы кубической структуры:
Bi40Ge2O63 (BGO), Bi12Si020
(BSO).
Значения электрооптических коэффициентов
для этих материалов приведены в работе .
Наиболее высокий коэффициент Поккельса имеют кристаллы LiNbO3 и LiTaO3.
Первый из них был выбран нами в качестве чувствительного элемента (ЧЭ) датчика-преобразователя напряженности электрического
поля.
Поперечное электрическое поле напряженностью
Е, приложенное перпендикулярно распространению света в оптическом волокне или ЧЭ, приводит к
дополнительному линейному двулучепреломлению вследствие
эффекта Керра :
be = Ck Е2/l
где Ck -
постоянная Керра (для кварца Ck =
6.10 -16 мин/В2).
Это двулучепреломление
играет заметную роль в изотропных средах при Е>10 кВ/см.
Измерения магнитного поля:
Магнитное поле напряженностью H, приложенное к оптическому
волокну или
ЧЭ в направлении распространения света,
вызывает вращательное двулучепреломление,
поворачивающее плоскость поляризации
(вследствие эффекта Фарадея);
bh= Cv Н
где Cv - постоянная Верде, равная для кварца 9,4.10-3 рад/э×Гс.
После прохождения света через прозрачные
оптические материалы в магнитном поле, вектор напряженности которого
совпадает с направлением распространения света, наблюдается поворот
плоскости поляризации на угол:
jF = Cv H L
где
L -
длина светового пути под воздействием магнитного поля.
Постоянная Верде зависит от магнитных свойств материала. У
диамагнетиков и парамагнетиков (стекло, кубические кристаллы) она
составляет 0,04...0,02 мин/(Э.см) . У
ферромагнетиков (железо-итриевый
гранат) значение постоянной Верде достигает 9...50
мин/(Э.см) и угол поворота составляет :
j1=(y/4pМs)НL приН<4pМs’(1)
j2=yL при H>4pМ s’
(1а)
где
y - угол поворота при намагниченности
насыщения H = 4pM s’.
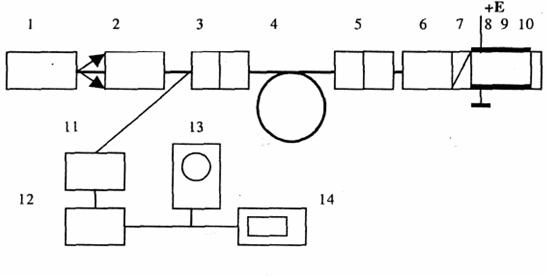
Рисунок
2.6.17- Схема установки с датчиком
Здесь учитывается нелинейный характер
намагниченности ферромагнетика, являющийся недостатком при
разработке датчиков на его основе. Кроме того, ферромагнетикам присущ
гистерезис, что приводит к снижению точности датчиков и ограничению
их использования в области высоких частот. Преимущество датчиков
на основе ферромагнетиков - малый размер ЧЭ. Плёнка железо-итриевого
граната толщиной 20...30 мкм позволяет регистрировать поля
напряженностью 1... 10 Гс.
Некоторые прозрачные материалы (например,
раствор сахара) имеют собственную оптическую активность, т.е. поворачивают
плоскость поляризации на угол:
jс =aL
где a- коэффициент
поляризационной активности. Этот поворот необходимо учитывать в
датчиках магнитного поля на основе эффекта Фарадея .
Важная особенность эффекта
Фарадея - необратимость поворота плоскости
поляризации при прохождении в прямом и обратном направлениях. При
прохождении ЧЭ в обратном направлении плоскость поляризации
дополнительно поворачивается на тот же угол, что и в прямом .
2.6.7 Позиционно-чувствительные
сенсоры
Две основные схемы:
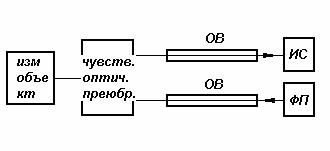
Рисунок 2.6.18 - Изменение параметров
внешней среды в изменение параметров светового луча
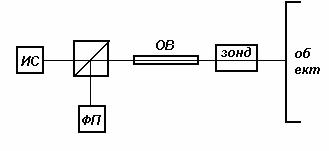
Рисунок 2.6.19 - Передача светового
сигнала через ОВ
На рисунке 2.6.18
чувствительный оптический элемент преобразует изменение параметров внешней
среды в изменение параметров светового луча. На рисунке 2.6.19 сенсорная
головка (зонд-микрообъектив) передает через ОВ
световой сигнал.
Для световой волны вектор
напряженности электрического поля описывается следующей формулой:
![]()
из которой следует, что
измеряемым объектом может модулироваться интенсивность света ![]() , его поляризации (направление вектора А), частота ω, фазе ψ и любой из
этих видов модуляции может применяться в ВОД.
, его поляризации (направление вектора А), частота ω, фазе ψ и любой из
этих видов модуляции может применяться в ВОД.
Температурный датчик
может быть построен по методам:
Рисунок 2.6.20 - Построение
температурного датчика на основе теплового
излучения
1) тепловое излучение
2) поглощение света ПП
3) на основе флюоресценции
Сигнал преобразуется по
методу 3-х цветов (или 3-х λ) СФ – светофильтры.
Рисунок 2.6.21 - Построение
температурного датчика на основе поглощения света ПП
Связь T с интенсивностью излучения
![]()
Полупроводник имеет граничную длину волны λг поглощения, причем по мере роста t° поглощение усиливается. При этом
интенсивность света с увеличением температуры будет падать.
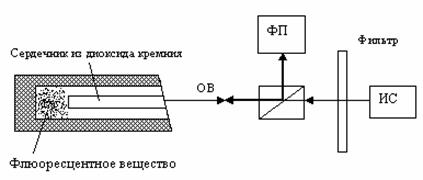
Рисунок 2.6.22 - Построение температурного
датчика на основе флюоресценции
Флюоресценция возникает
под действием ультрафиолета и принимается ОВ. Для спектральных составляющих
флуоресцентного излучения характерно изменение по кривой β
(при λ = 510 нм), т.е. сильная зависимость от
температуры, а температурный сигнал выявляется путем вычисления отношения
соответствующих значений интенсивности β/α (метод двух
волн). Область изменения: -50<t<+200
с
погрешностью C и τ
< 1 c.
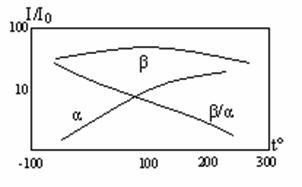
Рисунок 2.6.23 - Метод двух волн
2.6.8 Детекторы цвета
Датчики давления с отражательной диафрагмой. Волоконный жгут состоит из передающих
и принимающих волокон. Свет, вводимый в передающие волокна, отражается
диафрагмой. при этом
коэффициент связи между передающими и принимающими ОВ изменяется в соответствии
с положением диафрагмы, которое в свою очередь зависит от давления.
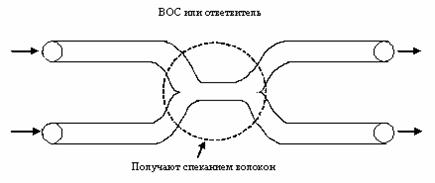
а)
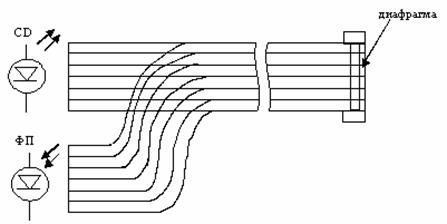
б)
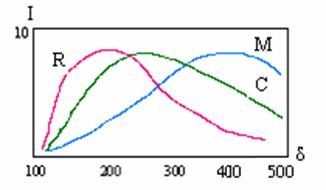
в)
Рисунок 2.6.24 - Датчики
давления с отражательной диафрагмой
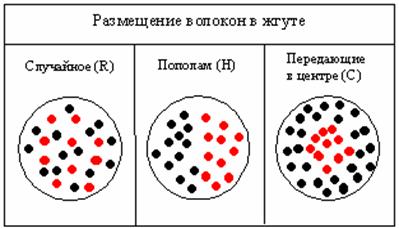
Рисунок 2.6.25 - Размещение волокон в
жгуте
Датчик используется в
диапазоне, где зависимость интенсивности света от зазора сравнительно линейна. Dж=1,8 мм из 100 ОВ, диафрагма из нержавеющей стали h=15
мкм; P до 2,7*104 Па. Применяется для измерения давления крови.
В датчиках с
жидкокристаллическим зондом используется эффект изменения коэффициента
рассеяния света жидким кристаллом при изменении давления.
Применяют композиционный ЖК, состоящий на 1/3 из холерестического
и 2/3 из нематического кристаллов. Измеряемое
давление P до 4*104 Па. Недостаток – сильная зависимость от t˚, поэтому необходима
температурная компенсация.
2.6.9 Химически
селективный волоконно-оптический сенсор
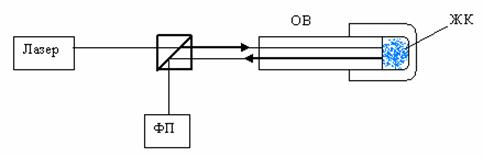
Рисунок 2.6.26 - Химически
селективный волоконно-оптический сенсор
2.6.10 Датчики концентрации газа
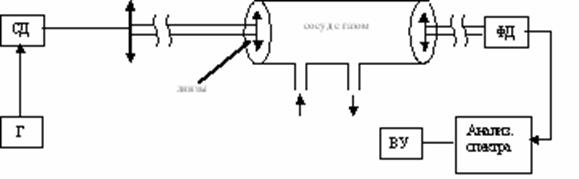
Рисунок 2.6.27 - Датчик концентрации
газа
Свет,
излучаемый лазером или светодиодом поступает в сосуд с измеряемым газом через многомодовое ОВ. Из проходящих через газ световых волн
будут поглощаться только те, которые входят в спектр поглощения этого газа.
Таким образом, подавая выходящий из сосуда с газом свет на детектор, можно
определять род газа и измерять его концентрацию. Анализируя спектр выходящего
излучения можно определить род газа и его концентрацию.
2.6.11 ОВ датчик насыщения крови
кислородом
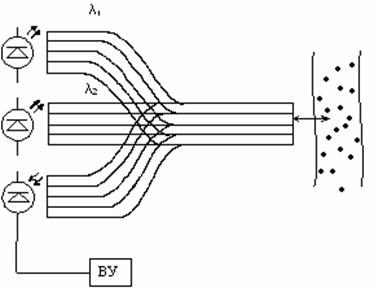
а)
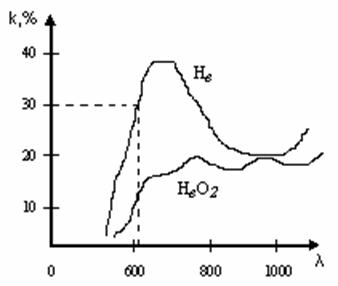
б)
Рисунок 2.6.28 - ОВ датчик насыщения крови кислородом
Гемоглобин красных
кровяных телец имеет различный характер изменения коэффициента отражения в
зависимости от степени насыщения кислородом для световых волн различной длины.
В диапазоне 620…650 нм зависимость сильная, а для волн 800…850 нм - слабая.
Сигнал с ФД подается в ВУ где вычисляется отношение
выходных электрических сигналов, полученных на двух длинах волн:
k = I(1)/I(λ2)
Другим классом датчиков
являются ВОД, где в качестве чувствительного элемента выступает само ОВ.
Схема интерферометра на
ОВ. Высокая чувствительность, т.к. измерение идет в длинах волн λ и
используется катушка из ОВ, увеличивающая протяженность связи с объектом. При
измерении фазы достигнута S = 10-6рад/ГГц.
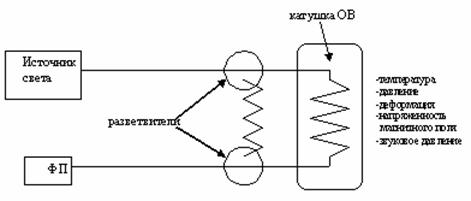
Рисунок 2.6.29 - Схема интерферометра
основе изменения фазы
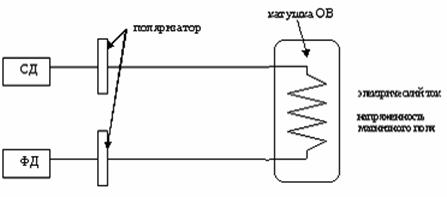
Рисунок 2.6.30 - Схема интерферометра
основе вращения плоскости поляризации
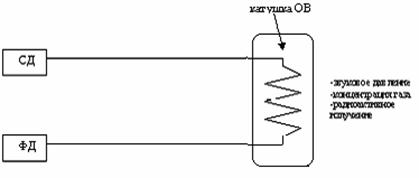
Рисунок 2.6.31 - Схема интерферометра
основе измерения потерь
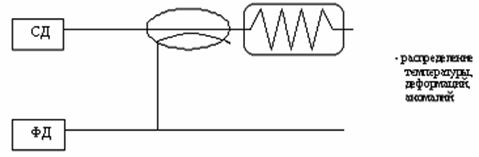
Рисунок 2.6.31 - Схема интерферометра
основе рассеяния
Наиболее типичными
измеряемыми величинами являются температура, длина, давление. В соответствии с
их колебаниями изменяется длина и коэффициент преломления ОВ, а в результате
изменяется и фаза распространяющегося в нем света.
Измеряемые
величины типа: электрический ток, ускорение, скорость потока, деформация,
спектр поглощении, напряженность магнитного и электрического тока, звук и т.д.
преобразуются в рис.2.48, рис.2.49, рис.2.50 с помощью нанесенного на
оптическое волокно соответствующего покрытия.
2.6.12 Структуры.
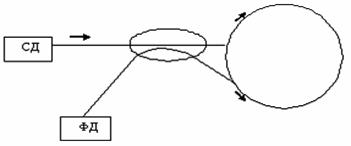
а)
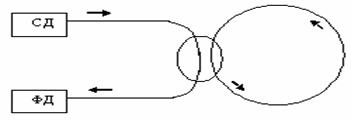
б)
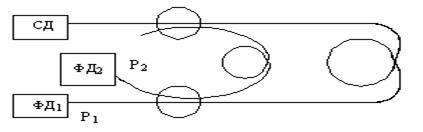
в)
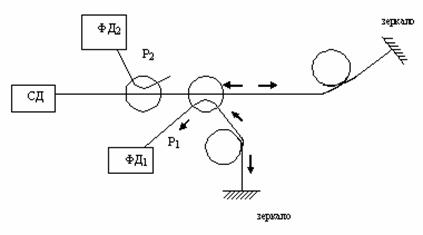
г)
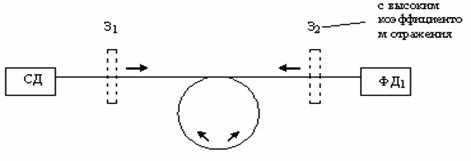
д)
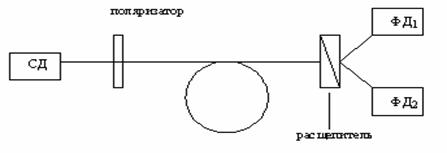
е)
а- кольцевой, б- кольцевой Фабри-Перо, в- Маха-Цендера, г-
Майкельсона, д- Фабри-Перо,
е- с поляризованными модами
Рисунок 2.6.32 - Схемы волоконно-оптических
интерферометров:
В
структурах интерферометров, за исключением Фабри-Перо,
интенсивность интерференционных полос I∑1 и I∑2 при интенсивности двух световых волн I1 и I2 равны
![]()
![]()
γ – показатель,
называемый степенью когерентности интерферометра. Он является функцией
произведения ширины ∆f спектральной линии источника света и разности ∆l длин двух
оптических путей.
![]()
при ∆f∆l = 0,
то γ = 1.
Для данной величины ∆f можно найти
∆l, при котором показатель γ
окажется равным e-1, и эта длина ∆l называется длиной когерентности. Для обычного
гелий-неонового лазера – единицы метров; для ПП лазеров около
Таким образом, источник
света необходимо выбирать в соответствии со структурой интерферометра.
Основные погрешности:
- Дрейф нуля;
- Колебания масштабного коэффициента;
- Нелинейность;
Методы устранения:
1
при
гомодинировании:
- применение фазовращателя
- ограничение частоты сигнала
т.е. одинаковая частота двух
интерферирующих волн, а выходной сигнал формируется посредством прямой
амплитудной модуляции.
2
при
гетеродинировании:
- применение частотного сдвигателя, например акустического модулятора.
т.е. формирование сигнала
пропорционального разности частот ∆ω, посредством фазовой манипуляции несущей с
частотой ∆ω.
2.6.13 Примеры
реализации:
1 ОВД для измерения концентрации газа. Датчик на интерферометре Маха-Цендера.
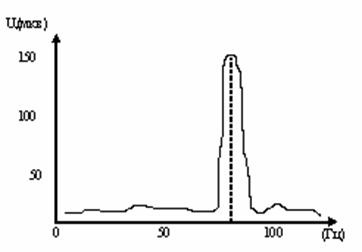
Рисунок 2.6.33 - Кривая частотного
изменения выходного сигнала при поглощении света смесью воздуха с метаном
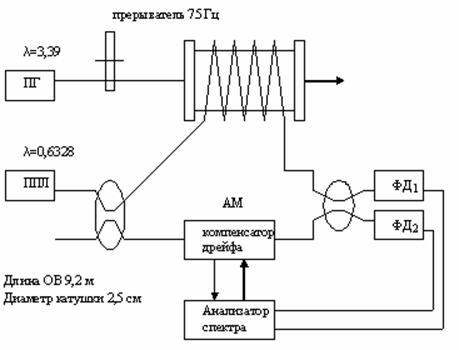
Рисунок 2.6.34 - Датчик на
интерферометре Маха-Цендера.
Чем выше концентрация,
тем больше амплитуда выходного сигнала интерферометра на частоте АМ.
Исследуемый газ в ячейке
освещается от аргонового лазера, излучение которого модулировано с помощью мех
модулятора. Ячейка находится внутри катушки из ОВ. Газ вследствие поглощения
света нагревается и расширяется, следовательно
расширяется и катушка с ОВ.
Изменение объема катушки
ОВ приводит к появлению фазового сдвига в интерферометре, которое
регистрируется ФД.
1.
ОВД
для измерения скорости тока крови.
Рисунок 2.6.35 - ОВД для измерения
скорости тока крови.
В одном плече
интерферометра Маха-Цендера осуществляется УЗ
модуляция света и оптический сигнал приобретает сдвиг
частоты на fв.
Частота биений fD (сигнал биений, обнаруживаемый методом гетеродинирования с помощью лавинного ФД)
Частотный сдвиг света в
результате эффекта Доплера:
fD=(2V/λ)*cosθ или fD=(2π/λ)*cosθ
Диапазон V от 4 см/с до 10 см/с. Обн.
погрешность ±5%
2.
Оптоволоконный
детектор алкоголя.
Этанол и метанол –
вещества, как известно, токсичные и взрывоопасные – широко используются в
промышленности, поэтому нужду в датчиках, чувствительных к присутствию в
воздухе этих веществ, испытывают не только сотрудники ГИБДД. Японские
исследователи из университета Яманиши предложили
простой и надежный метод обнаружения паров алкоголя с помощью оптоволоконного
датчика.
Рисунок 2.6.36 Оптоволоконный
детектор алкоголя.
Некоторые полимеры,
например, Новолак, разбухают при выдержке в парах
спирта. Разбухание сопровождается изменением (уменьшением) показателя преломления.
Этим свойством решили воспользоваться японские исследователи. Из другого
полимера с показателем преломления n1 был изготовлен сердечник волновода, покрытый тонким слоем Новолака (либо комплексов на его основе), имеющих
показатель преломления n2 >n1 в
отсутствии паров спирта. Этот чувствительный элемент длиной несколько
сантиметров с обоих концов подсоединяется к обычному
оптоволокну с тем же сердечником. Через подобный комбинированный световод пропускается излучение светодиода, которое на выходе
регистрируется с помощью с помощью фоточувствительного элемента. В отсутствии
паров алкоголя чувствительный элемент функционирует как световод
с утечкой – свет выходит через боковую поверхность (из оптически менее плотной
среды в оптически более плотную среду). Однако в присутствии этанола или
метанола оболочка оптоволокна разбухает и показатель преломления уменьшается,
так что после выдержки в парах спирта n2 становится меньше n1. В результате световод
начинает работать в нормальном волноводном режиме. При этом сигнал на выходе
увеличивается примерно на порядок. Для того, чтобы
обеспечить быстродействие, разница в показателях преломления сердечника и
оболочки была сделана малой – примерно 0.05, - а толщина слоя из комплекса на
основе Новолака не превышала полутора микрон. В
результате оболочка быстро напитывается спиртом и
резкое увеличение сигнала на выходе происходит менее чем за минуту.
Рисунок 2.6.37 -
Достоинства предложенного
устройства в его простоте, надежности, легкости подключения к сигнальной
аппаратуре, неприхотливости и невысокой стоимости. В силу того, что детектор не
очень чувствителен к малым концентрациям алкоголя и, к тому же, относительно
инерционен с точки зрения экспресс-диагностики, в настоящем
виде он вряд ли будет применяться дорожной полицией. Однако у него большие
перспективы применения в промышленности (датчик утечек), в частности, при
использовании метанола в качестве экологически чистого топлива.
Рисунок
2.6.38 -